התחלה מהירה עם Limelight 4

מפרט חומרה
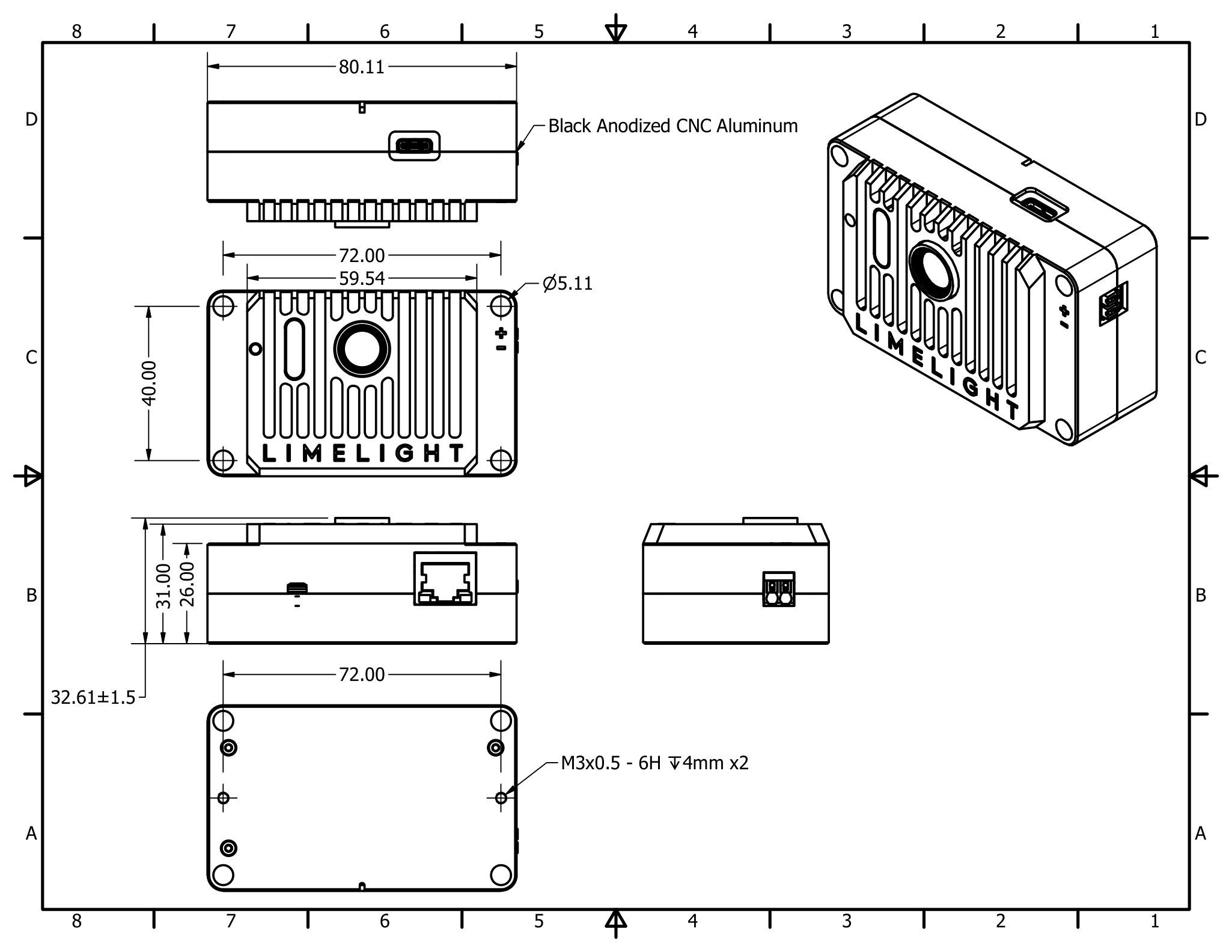
- טביעת רגל: 3.154in x 1.894in (80.11mm x 48.11mm)
- עובי: 1.160in (29.46mm)
- משקל: 0.3 lb
- הרכבה עם חורים עוברים #10 / M4
- חורי הרכבה מושחלים M3
- כניסת מתח: Buck-Boost עם פעולה ב-5V-26V (3.5V - 35V מקסימום מוחלט)
- הגנה משופרת מפני מעברי מתח ליישומי רובוטיקה
- צריכת הספק מקסימלית 12W
- חיישן: OV9281 Global Shutter מונוכרום (1280x800 @ 120FPS, 640x400 @ 240FPS)
- ערכת שדרוג IMX462 Back-Illuminated בקרוב.
- עדשת M12 ניתנת להחלפה
- שדה ראייה אופקי 82 מעלות, שדה ראייה אנכי 56.2 מעלות
- מארז אלומיניום מלא עם אנודייז שחור
- יציאת Gigabit Ethernet RJ45 (POE כבר לא נתמך)
- יציאת כניסת מתח Weidmuller
- יציאת USB C להדמיה וקישוריות
- IMU פנימי
- תמיכה במאיץ AI Hailo 8 עם יציאת M.2 A+E Key פנימית.
יכולות תוכנה (Limelight OS)
- ראייה ממוחשבת בביצועים גבוהים מוכנה לשימוש. לא נדרש ניסיון.
- ממשק משתמש מבוסס דפדפן לתצורת צינורות ראייה
- תמיכה ב-REST/HTTP, Websocket, NetworkTables, ModbusTCP ו-ROS
- קישוריות USB עם תמיכה בדרייבר USB-Ethernet מוכן לשימוש ב-Windows, Linux, MacOS ו-Android
- תמיכה ברשתות נוירונים לזיהוי אובייקטים MobileNetSSD ב-20FPS בגרירה ושחרור (הסקה על CPU)
- תמיכה ברשתות נוירונים לזיהוי אובייקטים YoloV8 ב-80FPS בגרירה ושחרור (דורש Hailo-8)
- חשיפה קבועה, רווח חיישן, רזולוציה וקצב פריימים ניתנים להגדרה.
- הגדרת 10 צינורות ראייה הניתנים להחלפה חמה:
- צינורות Python מותאמים אישית עם OpenCV 4.10, numpy וכו'.
- מעקב AprilTag דו-ממדי ותלת-ממדי ולוקליזציה של רובוט
- לוקליזציה תלת-ממדית מלאה (GPS לרובוט) עם MegaTag1
- לוקליזציה תלת-ממדי�ת מלאה בדיוק גבוה יותר (GPS לרובוט) עם מיזוג IMU חיצוני עם MegaTag2
- מיזוג IMU פנימי ללוקליזציה MegaTag2 בדיוק גבוה יותר
- מצבי סיוע IMU למיזוג IMU פנימי ו-IMU חיצוני או הערכת Yaw מבוססת מצלמה
- ביצועים של עד 240FPS עם הקטנת רזולוציית הגלאי
- ויזואליזציה תלת-ממדית מלאה בממשק האינטרנט
- צינורות זיהוי כתמי צבע ב-120-240FPS
- צינורות זיהוי אובייקטים נוירוניים
- צינורות סיווג תמונות נוירוניים
- צינורות מעקב ברקודים
- צינור מיקוד עדשה
- צינור Viewfinder לסטרימינג בהשהיה נמוכה
- ממשק כיול Charuco Intrinsics מובנה לצינורות ראייה בדיוק גבוה.
- ויזואליזציה של כיול Intrinsics
- סטרימינג MJPEG מובנה בהשהיה נמוכה. כיוון סטרים ניתן להגדרה
בעיות ידועות
- קצבי פריימים של Apriltag עם האצת Hailo נמוכים מדי כאשר הקטנת רזולוציה מופעלת (יטופל בעדכון תוכנה)
- קריאות טמפרטורה מ-NetworkTables אינן מדויקות כאשר throttling מופעל (יטופל בעדכון תוכנה)
1. הרכבת Limelight 4
הרכבה עם חורים עוברים
- השתמשו בברגים #10-32 או #10-24 באורך 1 1/4" עם אומים nylock
- לחלופין, השתמשו בברגי M4 באורך 38mm עם אומים nylock
- השתמשו בוושרים פלסטיים לשמירה על האנודייז
הרכבה מושחלת (צד אחורי)
- 2 נקודות הרכבה מושחלות M3
- שקלו מריחה קלה של נוזל נעילת ברגים
2. חיווט Limelight 4
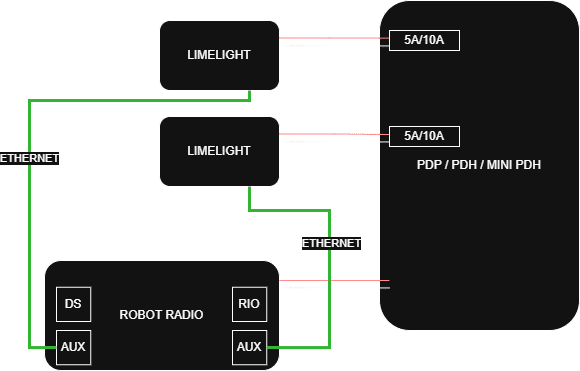
מתח
- העבירו שני חוטים 18-20AWG מה-Limelight שלכם לחריץ ב-PDP, PDH או Mini PDP
- השתמשו בפיוז 5A או 10A
- POE כבר לא נתמך
- הערה: בניגוד לדגמים ק�ודמים, LL4 יכול לשרוד אירועי ניתוק סוללה ובלימה רגנרטיבית ללא צורך ב-VRM ייעודי
- (לא נדרש) השתמשו בפררולים של Weidmuller לתוצאות אופטימליות (בתמונה, חוט 20AWG עם פררולים כתומים של Weidmuller 20AWG)
- פררולים:
- כלי לחיצת פררולים בעלות נמוכה:

Ethernet
- העבירו כבל ethernet מה-Limelight שלכם לרדיו הרובוט
- השתמשו בכבלי Cat6 שזורים עם חוטים גמישים (א�ידיאלית 20AWG)
- הוסיפו הקלת מתח לכבל ה-ethernet שלכם
- POE כבר לא נתמך
צריבה באמצעות USB
- כדי להיכנס למצב צריבה, החזיקו את כפתור התצורה בזמן חיבור USB C
- בזמן הצריבה, בטוח להפעיל את Limelight 4 דרך USB.
ממשק USB-Ethernet
- ל-Limelight 4 יש פונקציונליות USB-Ethernet המאפשרת קישוריות מוכנה לשימוש עם Windows, Linux ו-MacOS. תוכלו להשתמש בממשק האינטרנט ובכל התכונות האחרות דרך USB.
- בזמן השימוש בממשק זה, Limelight 4 יחרוג מדירוג ההספק של רוב יציאות ה-USB. מומלץ להפעיל את Limelight 4 דרך יציאת Weidmuller בזמן השימוש ב-USB-Ethernet.
- ממשק תצורת Limelight 4 ב-Windows (USB-Ethernet): http://172.28.0.1:5801
- ממשק תצורת Limelight 4 ב-Linux (USB-Ethernet): http://172.29.0.1:5801
3. גישה לממשק האינטרנט
לאחר חיבור ה-Limelight 4 שלכם לרשת:
- הפעילו את הרובוט וחברו את המחשב הנייד לרשת הרובוט
- השתמשו באחת מהשיטות הבאות לגישה לממשק האינטרנט:
- שיטה 1: פתחו את אפליקציית Limelight Hardware Manager, סרקו Limelights, ולחצו לחיצה כפולה על ה-Limelight שלכם כשהוא מופיע
- שיטה 2: פתחו דפדפן אינטרנט ונווטו ל-
http://limelight.local:5801 - שיטה 3: פתחו דפדפן אינטרנט ונווטו לכתובת ה-IP הסטטית של ה-Limelight שלכם עם פורט 5801 (אם הוגדר)
- שיטה 4 (USB): התחברו דרך USB-C ונווטו ל:
- Windows: http://172.28.0.1:5801
- Linux/Mac: http://172.29.0.1:5801
לאחר ההתחברות, תהיה לכם גישה ל:
- לשונית הגדרות - הגדרת מספר קבוצה, hostname והגדרות מערכת אחרות
- לשוניות צינורות ראייה - הגדרה וכיוון צינורות עיבוד הראייה שלכם
- לשונית מצלמה וכוונת - התאמת הגדרות מצלמה ופרמטרי כוונת
- לשונית ויזואליזציה תלת-ממדית - צפייה בזיהוי AprilTag ולוקליזציה בזמן אמת
כל התצורה נעשית דרך ממשק אינטרנט זה. שינויים נשמרים אוטומטית ל-Limelight שלכם.
4. עדכון LimelightOS
גבו את הצינורות והסקריפטים שלכם לפני השדרוג - הם יימחקו במהלך תהליך זה!
- כבו את ה-Limelight שלכם
- הורידו את דרייברי USB/RPIboot, תמונת Limelight OS וכלי Balena Flash העדכניים ביותר
- החזיקו את כפתור התצורה בזמן חיבור כבל USB-C מהמחשב הנייד ל-Limelight
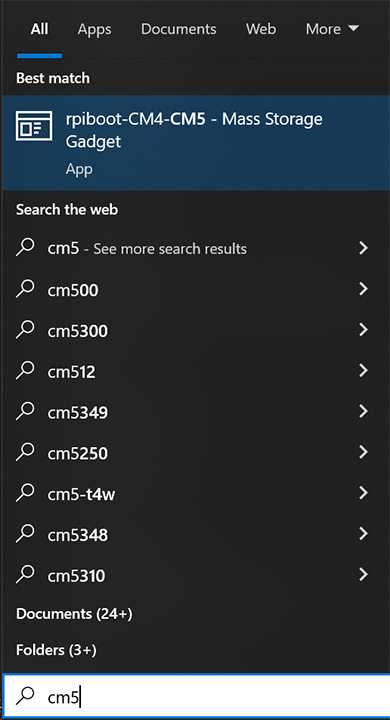
- הריצו "rpiboot-CM4-CM5 - Mass Storage Gadget" מתפריט ההתחלה של Windows
אתם אמורים לראות את הבא אם RPIBoot הצליח לעגן את ה-Limelight שלכם.
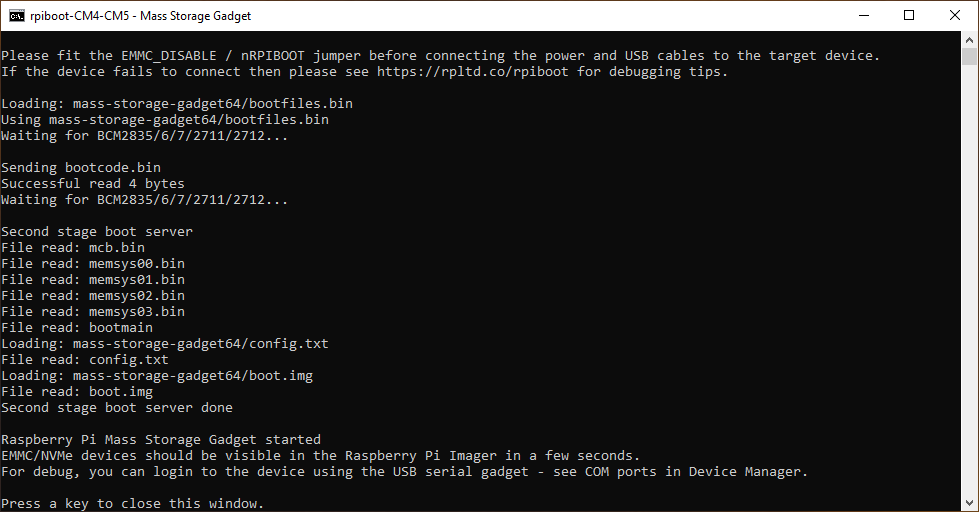
אם אתם רואים משהו אחר, נתקו את כבל ה-USB, לחצו שוב על הכפתור, הכניסו מחדש את כבל ה-USB, והפעילו מחדש את כלי rpiboot.
- הר�יצו "Balena Etcher" כמנהל מערכת
- לחצו על "Flash From File" ובחרו את תמונת ה-.zip העדכנית ביותר
- לחצו על "Select Target" ובחרו "mmcblk0 USB Device" בתפריט "Drives"
- לחצו על "Flash" והמתינו להשלמה
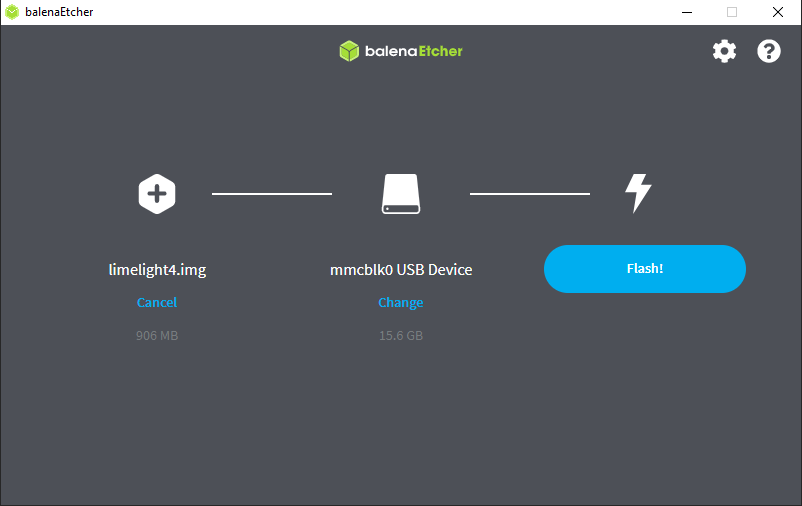
- נתקו את כבל ה-USB כשסיימתם
5. מיקוד ה-Limelight 4 שלכם
- הפעילו את הרובוט.
- התחברו לממשק האינטרנט כמתואר בסעיף 3
- לחצו על "Ignore NT pipeline index" כדי לאפשר החלפת צינורות, ועברו לצינור 9
- הגדירו את סוג הצינור ל-"focus"
- עברו ללשונית התצורה, והגדילו את איכות הסטרים למקסימום
- ודאו שהמצלמה מכוונת למשהו עם הרבה תכונות וניגודיות, כמו לוח ARUCO, סצנה מפורטת, או כוכב סימנס
- סובבו את העדשה כדי למקסם את ציון המיקוד על המסך
- לאחר המיקוד, מרחו 3-8 נקודות של דבק סופר או ג'ל דבק סופר סביב העדשה
6. תצורת רשת
הגדרת מספר קבוצה (נדרש עבור FRC / Networktables)
- הפעילו את הרובוט וחברו את המחשב הנייד לרשת הרובוט
- פתחו את Limelight Hardware Manager, סרקו Limelights, ולחצו לחיצה כפולה על הערך שמופיע.
- לחלופין, נווטו ל-http://limelight.local:5801
- עברו ללשונית "Settings"
- הזינו את מספר הקבוצה שלכם ולחצו על "Update Team Number"
הגדרת Hostname ייחודי (נדרש רק עבור מערכות FRC / Networktables עם מספר Limelights)
- אם אתם משתמשים במספר Limelights, לכל Limelight חייב להיות hostname ייחודי
- בלשונית ההגדרות, הגדירו hostname ולחצו על כפתור "set hostname".
הגדרת IP סטטי (מומלץ, לא נדרש)
- שנו את "IP Assignment" ל-"Static"
- הגדירו כתובת IP ל-"10.TE.AM.11"
- קבוצה 916 משתמשת ב-10.9.16.xx
- קבוצה 9106 משתמשת ב-10.91.6.xx
- קבוצה 9016 משתמשת ב-10.90.16.xx
- הגדירו Netmask ל-"255.255.255.0"
- הגדירו Gateway ל-"10.TE.AM.1"
- לחצו על "Update"
- הפעילו מחדש את הרובוט
- גשו לפאנל התצורה שלכם ב-10.TE.AM.11:5801 ולסטרים המצלמה ב-10.TE.AM.11:5800
- אם אתם משתמשים במספר Limelights, תנו לכל Limelight כתובת IP סטטית ייחודית. Gateways ו-netmasks צריכים להיות זהים בין ה-Limelights.
ש. למה אנחנו ממליצים על שימוש בכתובת IP סטטית?
ת. זה מוריד מספר שניות מזמן האתחול של Limelight. שנית, לקבוצות היו היסטורית בעיות עם הקצאת DHCP ומגיבי mDNS בשדות FRC אמיתיים ועם קושחת רדיו של אירועים.
אנחנו ממליצים להגדיר כתובות IP סטטיות גם ב-robo-rio ובתחנת הנהג שלכם. את הגדרות הרשת לשימוש בכל המכשירים האלה ניתן למצוא בחצי התחתון של דף אינטרנט זה
7. ניהול תרמי של Limelight 4
ניתן להפחית את הפלט התרמי של Limelight 4 על ידי הגדרת פרמטר ה-Throttle ל-100-200 כשהרובוט מושבת, ול-0 כשהרובוט מופעל. לחלופין, תוכלו לעבור לצינור viewfinder כשהרובוט מושבת.
8. התקנת מודול מאיץ AI Hailo (אופציונלי)
אם יש לכם את מודול מאיץ ה-AI Hailo האופציונלי, עקבו אחר השלבים הבאים להתקנתו:
- חברו את הפד התרמי המצורף ל-Hailo SOC (System on Chip)
- השתמשו במפתח אלן 1.5mm המצורף להס�רת שלושת ברגי המארז M2 באורך 8mm
- שימו את הברגים האלה בצד (יש להם חומר נעילת ברגים)
- פתחו בזהירות את המארז (שימו לב: כבל המצלמה יגביל עד כמה תוכלו לפתוח אותו)
- הכניסו את מודול ה-Hailo לחריץ המתאים
- לא נדרשים ברגים לאבטחת מודול ה-Hailo
- חברו מחדש את המארז באמצעות שלושת ברגי ה-M2 באורך 8mm המקוריים
- לאחר התקנת מודול ה-Hailo, הקפידו לעדכן לגרסה העדכנית ביותר של LimelightOS.
מודול מאיץ ה-Hailo אינו פועל עם מתח USB. הוא דורש מקור מתח יציב של 12V, כמו סוללת הרובוט הראשית, לפעולה תקינה.
8. פתרון בעיות
מחווני סרגל הסטטוס
- Cylon איטי (סריקה): לא זוהו מטרות על ידי הצינור הנוכחי
- Cylon מהיר (סריקה): זוהו מטרות על ידי הצינור הנוכחי
- הבהוב LED מתחלף איטי: שגיאת חומרה (כבל מצלמה מנותק, נזק לחיישן וכו')
אם limelight.local:5801 לא עובד
- בדקו אם Bonjour מותקן (Windows: הוספה/הסרה של תוכניות)
- הסירו "bonjour print services" אם יש לכם שני פריטי Bonjour
- התקינו Bonjour מדף ההורדות אם חסר
איפוס כתובת IP
- החזיקו את כפתור התצורה למשך 10 שניות לאחר שה-Limelight שלכם אותחל
- תצורת הרשת תתאפס לכתובות דינמיות באתחול הבא