Limelight 4 त्वरित-प्रारंभ

हार्डवेयर विनिर्देश
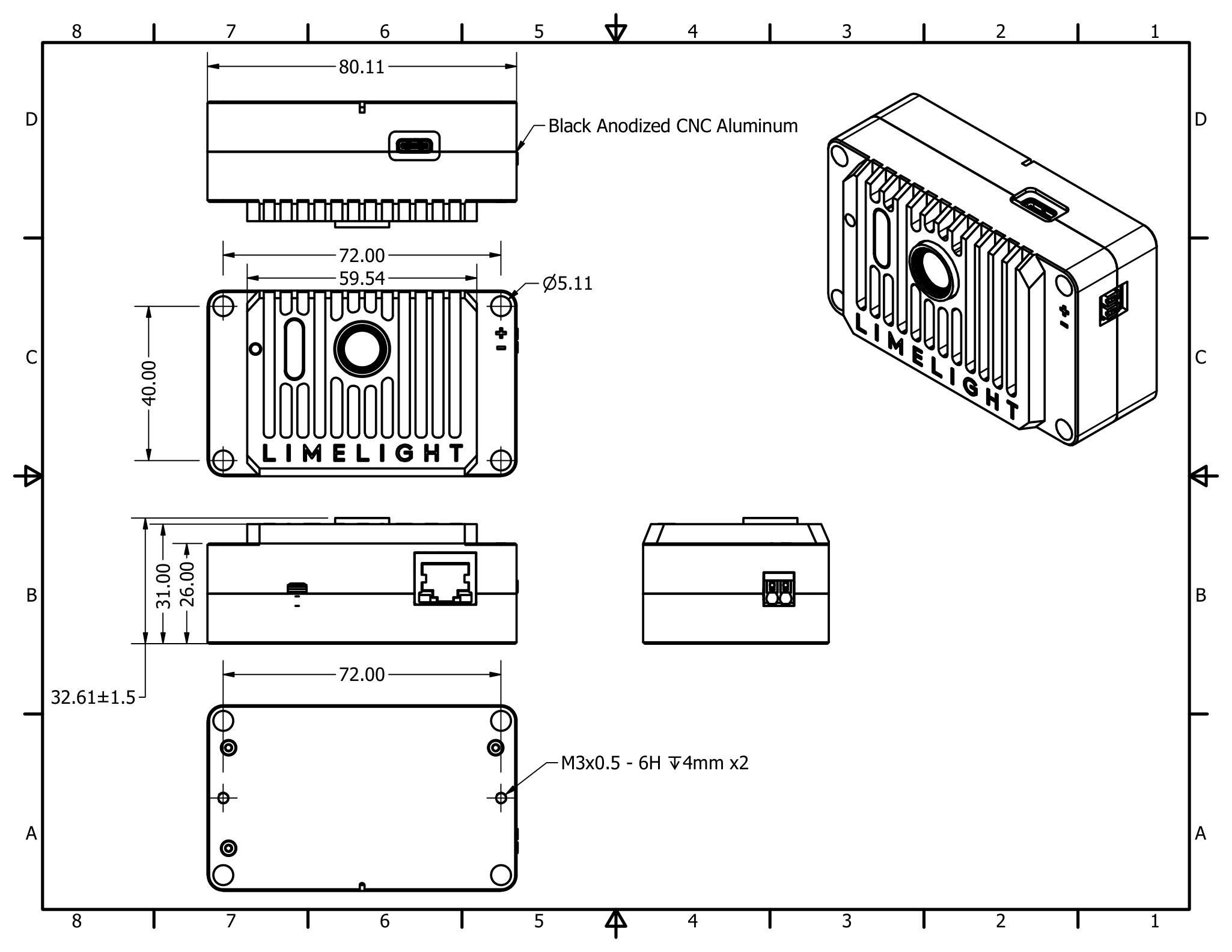
- फुटप्रिंट: 3.154in x 1.894in (80.11mm x 48.11mm)
- मोटाई: 1.160in (29.46mm)
- वजन: 0.3 lb
- #10 / M4 थ्रू-होल माउंटिंग
- M3 थ्रेडेड माउंटिंग होल
- पावर इनपुट: 5V-26V ऑपरेशन के साथ बक-बूस्ट (3.5V - 35V पूर्ण अधिकतम)
- रोबोटिक्स अनुप्रयोगों के लिए उन्नत ट्रांजिएंट सप्रेशन
- 12W अधिकतम बिजली खपत
- सेंसर: OV9281 ग्लोबल शटर मोनोक्रोम (1280x800 @ 120FPS, 640x400 @ 240FPS)
- IMX462 बैक-इल्यूमिनेटेड अपग्रेड किट जल्द आ रही है।
- बदलने योग्य M12 लेंस
- 82 डिग्री हॉरिजॉन्टल FOV, 56.2 डिग्री वर्टिकल FOV
- ब्लैक-एनोडाइज्ड, ऑल-एल्युमीनियम एनक्लोजर
- गीगाबिट ईथरनेट RJ45 पोर्ट (POE अब समर्थित नहीं है)
- Weidmuller पावर इनपुट पोर्ट
- USB C इमेजिंग और कनेक्टिविटी पोर्ट
- आंतरिक IMU
- आंतरिक M.2 A+E Key पोर्ट के साथ Hailo 8 AI एक्सेलेरेटर समर्थन।
सॉफ्टवेयर क्षमताएं (Limelight OS)
- प्लग-एंड-प्ले उच्च-प्रदर्शन विजन। कोई अनुभव आवश्यक नहीं।
- विजन पाइपलाइन कॉन्फ़िगरेशन के लिए सेल्फ-होस्टेड ब्राउज़र-आधारित UI
- REST/HTTP, Websocket, NetworkTables, ModbusTCP, और ROS समर्थन
- Windows, Linux, MacOS, और Android पर प्लग-एंड-प्ले USB-Ethernet ड्राइवर समर्थन के साथ USB कनेक्टिविटी
- ड्रैग-एंड-ड्रॉप 20FPS MobileNetSSD ऑब्जेक्ट डिटेक्टर न्यूरल नेटवर्क समर्थन (CPU इन्फरेंस)
- ड्रैग-एंड-ड्रॉप 80FPS YoloV8 ऑब्जेक्ट डिटेक्टर न्यूरल नेटवर्क समर्थन (Hailo-8 आवश्यक)
- कॉन्फ़िगर करने योग्य फिक्स्ड एक्सपोजर, सेंसर गेन, रेजोल्यूशन, और फ्रेमरेट।
- 10 हॉट-स्वैपेबल विजन पाइपलाइन कॉन्फ़िगर करें:
- OpenCV 4.10, numpy, आदि के साथ कस्टम Python पाइपलाइन
- 2D, 3D AprilTag ट्रैकिंग और रोबोट लोकलाइजेशन
- MegaTag1 के साथ पूर्ण 3D लोकलाइजेशन (रोबोट GPS)
- MegaTag2 के साथ एक्सटर्नल IMU फ्यूजन के साथ उच्च-सटीकता पूर्ण 3D लोकलाइजेशन (रोबोट GPS)
- उच्च-सटीकता MegaTag2 के लिए आंतरिक IMU फ्यूजन
- आंतरिक IMU और एक्सटर्नल IMU या कैमरा-आधारित Yaw अनुमान को फ्यूज करने के लिए IMU असिस्ट मोड
- डिटेक्टर डाउनस्केलिंग के साथ 240FPS तक प्रदर्शन
- वेब इंटरफेस में पूर्ण 3D विज़ुअलाइज़र
- 120-240FPS कलर ब्लॉब पाइपलाइन
- न्यूरल ऑब्जेक्ट डिटेक्शन पाइपलाइन
- न्यूरल इमेज क्लासिफिकेशन पाइपलाइन
- बारकोड ट्रैकिंग पाइपलाइन
- लेंस फोकसिंग पाइपलाइन
- कम-लेटेंसी स्ट्रीमिंग के लिए व्यूफाइंडर पाइपलाइन
- उच्च-सटीकता विजन पाइपलाइन के लिए बिल्ट-इन Charuco इंट्रिंसिक्स कैलिब्रेशन इंटरफेस।
- इंट्रिंसिक्स कैलिब्रेशन विज़ुअलाइज़ेशन
- बिल्ट-इन कम-लेटेंसी MJPEG स्ट्रीमिंग। कॉन्फ़िगर करने योग्य स्ट्रीम ओरिएंटेशन
ज्ञात समस्याएं
- डाउनस्केलिंग सक्षम होने पर Hailo एक्सेलेरेटेड Apriltag फ्रेमरेट बहुत कम हैं (SW अपडेट के साथ संबोधित किया जाएगा)
- थ्रॉटलिंग सक्षम होने पर NetworkTables से तापमान रीडिंग सटीक नहीं हैं (SW अपडेट के साथ संबोधित किया जाएगा)
1. Limelight 4 माउंटिंग
थ्रू-होल माउंटिंग
- nylock नट्स के साथ 1 1/4" #10-32 या #10-24 स्क्रू का उपयोग करें
- वैकल्पिक रूप से, nylock नट्स के साथ 38mm M4 बोल्ट का उपयोग करें
- एनोडाइजेशन को संरक्षित करने के लिए प्लास्टिक वॉशर का उपयोग करें
थ्रेडेड माउंटिंग (पीछे की तरफ)
- 2x M3 थ्रेडेड माउंटिंग पॉइंट
- थ्रेडलॉकर का हल्का अनुप्रयोग विचार करें
2. Limelight 4 वायरिंग
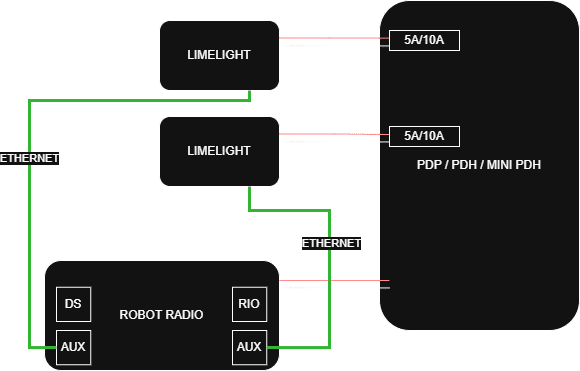
पावर
- अपने Limelight से अपने PDP, PDH, या Mini PDP पर एक स्लॉट तक दो 18-20AWG तार चलाएं
- 5A या 10A ब्रेकर का उपयोग करें
- POE अब समर्थित नहीं है
- नोट: पिछले मॉडलों के विपरीत, LL4 बैटरी डिस्कनेक्ट और रीजेनरेटिव �ब्रेकिंग इवेंट्स को समर्पित VRM की आवश्यकता के बिना सहन कर सकता है
- (आवश्यक नहीं) इष्टतम परिणामों के लिए Weidmuller फेरूल का उपयोग करें (चित्रित, 20AWG तार Weidmuller 20AWG ऑरेंज फेरूल के साथ)
- फेरूल:
- कम लागत वाले फेरूल क्रिम्प टूल:

ईथरनेट
- अपने Limelight से अपने रोबोट रेडियो तक एक ईथरनेट केबल चलाएं
- स्ट्रैंडेड तारों के साथ ट्विस्टेड Cat6 केबल का उपयोग करें (आदर्श रूप से 20AWG)
- अपने ईथरनेट केबल में स्ट्रेन रिलीफ जोड़ें
- POE अब समर्थित नहीं है
USB फ्लैशिंग
- फ्लैश मोड में प्रवेश करने के लिए, USB C पर प्लग-इन करते समय कॉन्फ़िगरेशन बटन दबाए रखें
- फ्लैशिंग के दौरान, USB पर Limelight 4 को पावर देना सुरक्षित है।
USB-ईथरनेट इंटरफेस
- Limelight 4 में USB-ईथरनेट कार्यक्षमता है जो Windows, Linux, और MacOS के साथ प्लग-एंड-प्ले कनेक्टिविटी की अनुमति देती है। आप USB पर वेब इंटरफेस और अन्य सभी सुविध��ाओं का उपयोग कर सकते हैं।
- इस इंटरफेस का उपयोग करते समय, Limelight 4 अधिकांश USB पोर्ट की पावर रेटिंग से अधिक होगा। USB-ईथरनेट का उपयोग करते समय weidmuller पोर्ट के माध्यम से Limelight 4 को पावर देने की सिफारिश की जाती है।
- Windows पर Limelight 4 कॉन्फ़िगरेशन UI (USB-ईथरनेट): http://172.28.0.1:5801
- Linux पर Limelight 4 कॉन्फ़िगरेशन UI (USB-ईथरनेट): http://172.29.0.1:5801
3. वेब इंटरफेस एक्सेस करना
अपने Limelight 4 को अपने नेटवर्क से कनेक्ट करने के बाद:
- अपने रोबोट को पावर अप करें और अपने लैपटॉप को अपने रोबोट के नेटवर्क से कनेक्ट करें
- वेब इंटरफेस एक्सेस करने के लिए इनमें से किसी एक विधि का उपयोग करें:
- विधि 1: Limelight Hardware Manager एप्लिकेशन खोलें, Limelights के लिए स्कैन करें, और जब यह दिखाई दे तो अपने Limelight पर डबल-क्लिक करें
- विधि 2: एक वेब ब्राउज़र खोलें और
http://limelight.local:5801पर नेविगेट करें - विधि 3: एक वेब ब्राउज़र खोलें और पोर्ट 5801 के साथ अपने Limelight के स्टैटिक IP एड्रेस पर नेविगेट करें (यदि कॉन्फ़िगर किया गया हो)
- विधि 4 (USB): USB-C के माध्यम से कनेक्ट करें और नेविगेट करें:
- Windows: http://172.28.0.1:5801
- Linux/Mac: http://172.29.0.1:5801
एक बार कनेक्ट होने के बाद, आपके पास एक्सेस होगा:
- Settings टैब - टीम नंबर, होस्टनेम, और अन्य सिस्टम सेटिंग्स कॉन्फ़िगर करें
- Vision Pipeline टैब - अपनी विजन प्रोसेसिंग पाइपलाइन सेट अप और ट्यून करें
- Camera & Crosshair टैब - कैमरा सेटिंग्स और क्रॉसहेयर पैरामीटर एडजस्ट करें
- 3D Visualization टैब - रियल-टाइम AprilTag डिटेक्शन और लोकलाइजेशन देखें
सभी कॉन�्फ़िगरेशन इस वेब इंटरफेस के माध्यम से किया जाता है। परिवर्तन स्वचालित रूप से आपके Limelight में सेव हो जाते हैं।
4. LimelightOS अपडेट करना
अपग्रेड करने से पहले अपनी पाइपलाइन और स्क्रिप्ट का बैकअप लें - इस प्रक्रिया के दौरान वे मिटा दी जाएंगी!
- अपने Limelight को पावर ऑफ करें
- नवीनतम USB ड्राइवर/RPIboot, Limelight OS इमेज, और Balena Flash टूल डाउनलोड करें
- अपने लैपटॉप से अपने Limelight तक USB-C केबल कनेक्ट करते समय config बटन दबाए रखें
- Windows स्टार्ट मेनू से "rpiboot-CM4-CM5 - Mass Storage Gadget" चलाएं
यदि RPIBoot ने आपके Limelight को सफलतापूर्वक माउंट किया है तो आपको निम्नलिखित दिखाई देना चाहिए।
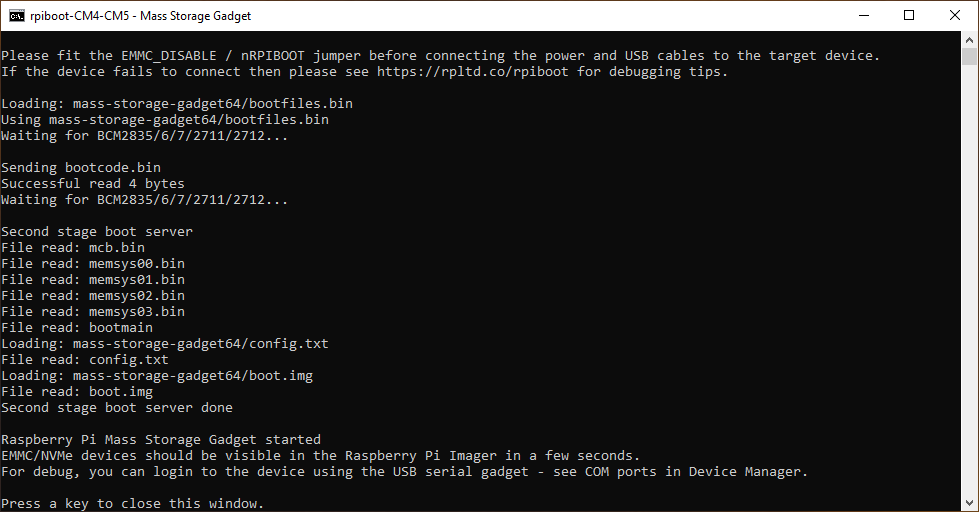
यदि आपको कुछ और दिखाई देता है, तो USB केबल हटाएं, बटन फिर से दबाएं, USB केबल फिर से डालें, और rpiboot यूटिलिटी को रीस्टार्ट करें।
- "Balena Etcher" को एडमिनिस्ट्रेटर के रूप में चलाएं
- "Flash From File" पर क्लिक करें और नवीनतम .zip इमेज चुनें
- "Select Target" पर क्लिक करें और "Drives" मेनू में "mmcblk0 USB Device" चुनें
- "Flash" पर क्लिक करें और पूरा होने की प्रतीक्षा करें
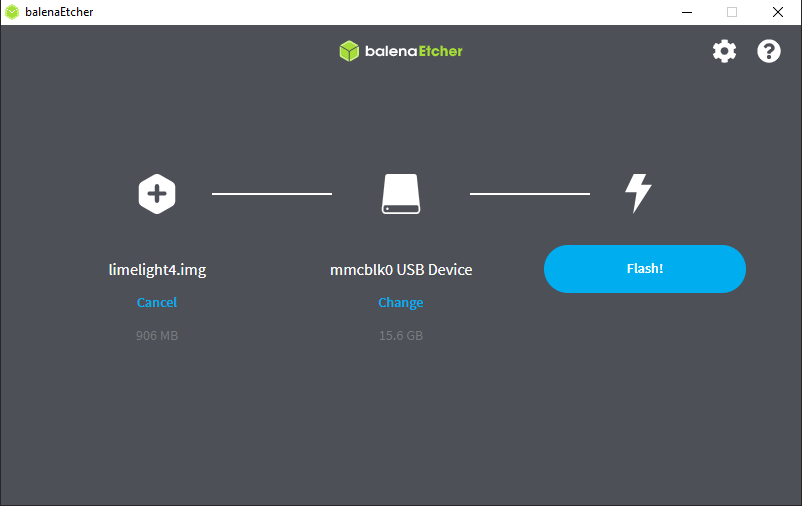
- पूरा होने पर USB केबल हटाएं
5. अपने Limelight 4 को फोकस करना
- अपने रोबोट को पावर-ऑन करें।
- सेक्शन 3 में वर्णित अनुसार वेब इंटरफेस से कनेक्ट करें
- पाइपलाइन स्विचिंग सक्षम करने के लिए "Ignore NT pipeline index" पर क्लिक करें, और पाइपलाइन 9 पर स्विच करें
- पाइपलाइन टाइप को "focus" पर सेट करें
- कॉन्फ़िगरेशन टैब पर जाएं, और स्ट्रीम क्वालिटी को अधिकतम तक बढ़ाएं
- सुनिश्चित करें कि कैमरा बहुत सारी विशेषताओं और कंट्रास्ट वाली किसी चीज़ की ओर इशारा कर रहा है, जैसे ARUCO बोर्ड, एक विस्तृत दृश्य, या सीमेंस स्टार
- ऑन-स्क्रीन फोकस स्कोर को अधिकतम करने के लिए लेंस को घुमाएं
- एक बार फोकस हो जाने के बाद, लेंस के चारों ओर सुपर ग्लू या सुपर ग्लू जेल के 3-8 डॉट्स लगाएं
6. नेटवर्क कॉन्फ़िगरेशन
टीम नंबर सेट करना (FRC / Networktables के लिए आवश्यक)
- अपने रोबोट को पावर अप करें और अपने लैपटॉप को अपने रोबोट के नेटवर्क से कनेक्ट करें
- Limelight Hardware Manager खोलें, Limelights के लिए स्कैन करें, और दिखाई देने वाली एंट्री पर डबल क्लिक करें।
- वैकल्पिक रूप से, http://limelight.local:5801 पर नेविगेट करें
- "Settings" टैब पर जाएं
- अपना टीम नंबर दर्ज करें और "Update Team Number" दबाएं
एक यूनिक होस्टनेम सेट करना (केवल कई Limelights वाले FRC / Networktables सिस्टम के लिए आवश्यक)
- यदि आप कई Limelights का उपयोग कर रहे हैं, तो प्रत्येक Limelight का एक यूनिक होस्टनेम होना चाहिए
- Settings टैब में, एक होस्टनेम कॉन्फ़िगर करें और "set hostname" बटन पर क्लिक करें।
स्टैटिक IP सेट करना (अनुशंसित, आवश्यक नहीं)
- "IP Assignment" को "Static" में बदलें
- IP एड्रेस को "10.TE.AM.11" पर सेट करें
- टीम 916 10.9.16.xx का उपयोग करती है
- टीम 9106 10.91.6.xx का उपयोग करती है
- टीम 9016 10.90.16.xx का उपयोग करती है
- Netmask को "255.255.255.0" पर सेट करें
- Gateway को "10.TE.AM.1" पर सेट करें
- "Update" पर क्लिक करें
- अपने रोबोट को पावर-साइकल करें
- अपने config पैनल को 10.TE.AM.11:5801 पर और कैमरा स्ट्रीम को 10.TE.AM.11:5800 पर एक्सेस करें
- यदि आप कई Limelights का उपयोग कर रहे हैं, तो प्रत्येक Limelight को एक यूनिक स्टैटिक IP एड्रेस दें। Gateways और netmasks सभी Limelights में समान होने चाहिए।
प्र. हम स्टैटिक IP एड्रेस के उपयोग की सिफारिश क्यों करते हैं?
उ. यह Limelight के �बूट टाइम से कई सेकंड कम करता है। दूसरा, टीमों को ऐतिहासिक रूप से वास्तविक FRC फील्ड पर और इवेंट रेडियो फर्मवेयर के साथ DHCP असाइनमेंट और mDNS रेस्पॉन्डर्स के साथ समस्याएं हुई हैं।
हम आपके robo-rio और driverstation पर भी स्टैटिक IP एड्रेस सेट करने की सिफारिश करते हैं। इन सभी डिवाइसों पर उपयोग करने के लिए नेटवर्किंग सेटिंग्स इस वेब पेज के निचले आधे हिस्से के पास मिल सकती हैं
7. Limelight 4 थर्मल मैनेजमेंट
Limelight 4 के थर्मल आउटपुट को डिसेबल्ड होने पर Throttle पैरामीटर को 100-200 पर और इनेबल्ड होने पर 0 पर सेट करके कम किया जा सकता है। वैकल्पिक रूप से, आप डिसेबल्ड होने पर व्यूफाइंडर पाइपलाइन पर स्विच कर सकते हैं।
8. Hailo AI एक्सेलेरेटर मॉड्यूल इंस्टॉलेशन (वैकल्पिक)
यदि आपके पास वैकल्पिक Hailo AI एक्सेलेरेटर मॉड्यूल है, तो इसे इंस्टॉल करने के लिए इन चरणों का पालन करें:
- शामिल थर्मल पैड को Hailo SOC (System on Chip) से अटैच करें
- तीन 8mm M2 एनक्लोजर स्क्रू को हटाने के लिए शामिल 1.5mm Allen wrench का उपयोग करें
- इन स्क्रू को अलग रखें (इनमें थ्रेडलॉकिंग मटेरियल है)
- एनक्लोजर को सावधानी से खोलें (नोट: कैमरा केबल सीमित करेगी कि आप इसे कितना खोल सकते हैं)
- Hailo मॉड्यूल को उपयुक्त स्लॉट में डालें
- Hailo मॉड्यूल को सुरक्षित करने के लिए किसी स्क्रू की आवश्यकता नहीं है
- मूल तीन 8mm M2 स्क्रू का उपयोग करके एनक्लोजर को फिर से अटैच करें
- Hailo मॉड्यूल इंस्टॉल करने के बाद, LimelightOS के नवीनतम संस्करण में अपडेट करना सुनिश्चित करें।
Hailo एक्सेलेरेटर मॉड्यूल USB पावर के साथ काम नहीं करता है। उचित कार्य के लिए इसे एक स्थिर 12V पावर स्रोत की आवश्यकता होती है, जैसे मुख्य रोबोट बैटरी।
8. समस्या निवारण
स्टेटस बार इंडिकेटर
- स्लो साइलॉन (स्कैनिंग): वर्तमान पाइपलाइन द्वारा कोई टारगेट नहीं मिला
- फास्ट साइलॉन (स्कैनिंग): वर्तमान पाइपलाइन द्वारा टारगेट मिले
- स्लो अल्टरनेटिंग LED ब्लिंक: हार्डवेयर एरर (कैमरा केबल डिस्कनेक्ट, सेंसर डैमेज, आदि)
यदि limelight.local:5801 काम नहीं करता
- जांचें कि क्या आपके पास Bonjour इंस्टॉल है (Windows: add/remove programs)
- यदि आपके पास दो Bonjour आइटम हैं तो "bonjour print services" को अनइंस्टॉल करें
- यदि गायब है तो Downloads पेज से Bonjour इंस्टॉल करें
IP एड्रेस रीसेट करें
- आपके Limelight के बूट होने के बाद config बटन को 10 सेकंड तक दबाए रखें
- नेटवर्किंग कॉन्फ़िगरेशन अगले बूट पर डायनामिक एड्रेसिंग पर रीसेट हो जाएगा