Limelight 4 快速入门

硬件规格
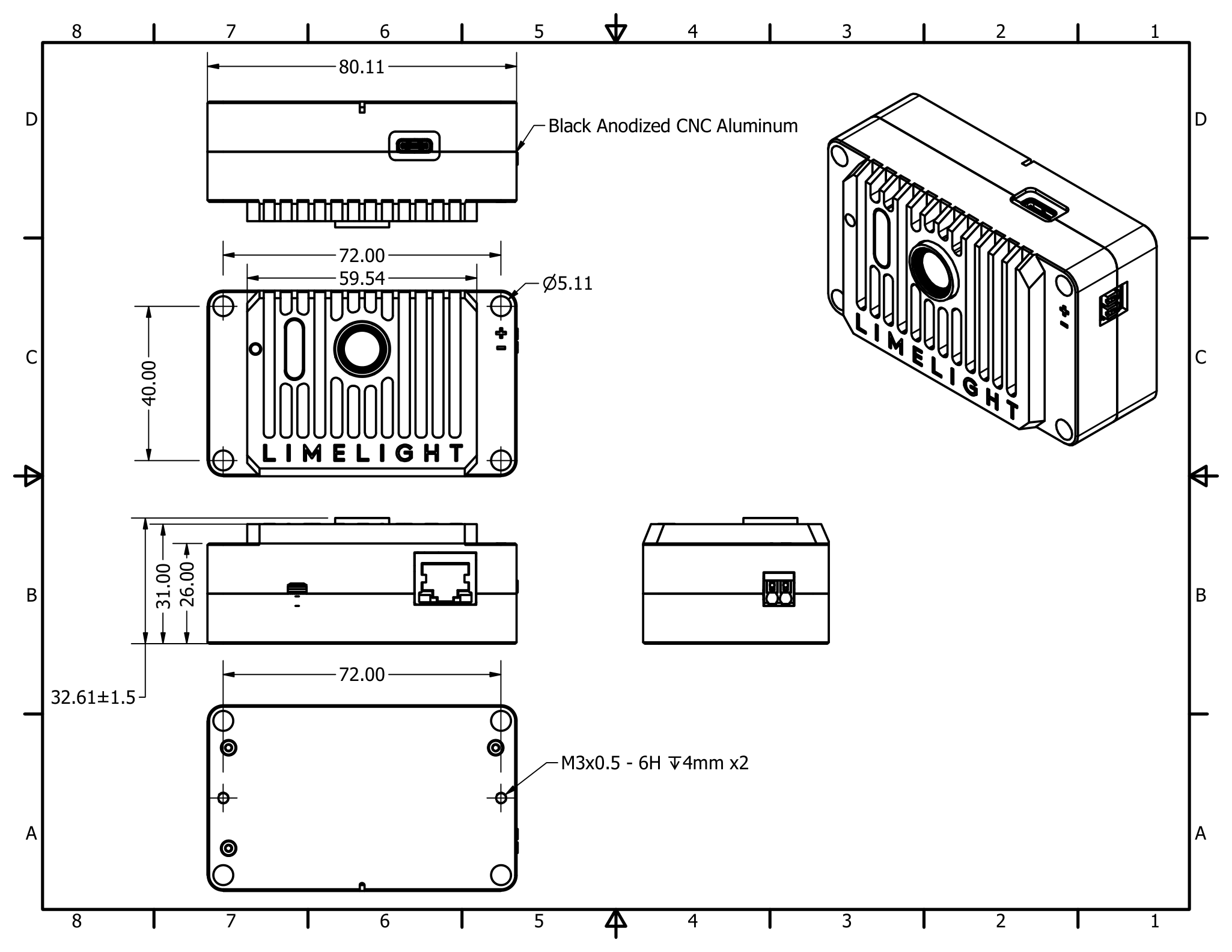
- 尺寸:3.154in x 1.894in (80.11mm x 48.11mm)
- 厚度:1.160in (29.46mm)
- 重量:0.3 lb
- #10 / M4 通孔安装
- M3 螺纹安装孔
- 电源输入:升降压转换器,支持 5V-26V 工作电压(绝对最大值 3.5V - 35V)
- 针对机器人应用增强的瞬态抑制
- 最大功耗 12W
- 传感器:OV9281 全局快门单色传感器(1280x800 @ 120FPS,640x400 @ 240FPS)
- IMX462 背照式升级套件即将推出
- 可更换 M12 镜头
- 82 度水平视场角,56.2 度垂直视场角
- 黑色阳极氧化全铝外壳
- 千兆以太网 RJ45 端口(不再支持 POE)
- Weidmuller 电源输入端口
- USB C 成像和连接端口
- 内置 IMU
- 支持 Hailo 8 AI 加速器,内置 M.2 A+E Key 端口
软件功能(Limelight OS)
- 即插即用的高性能视觉系统,无需经验
- 自托管的基于浏览器的视觉管道配置界面
- 支持 REST/HTTP、Websocket、NetworkTables、ModbusTCP 和 ROS
- USB 连接,支持 Windows、Linux、MacOS 和 Android 的即插即用 USB-Ethernet 驱动
- 拖放式 20FPS MobileNetSSD 目标检测神经网络支持(CPU 推理)
- 拖放式 80FPS YoloV8 目标检测神经网络支持(需要 Hailo-8)
- 可配置的固定曝光、传感器增益、分辨率和帧率
- 配置 10 个可热切换的视觉管道:
- 自定义 Python 管道,支持 OpenCV 4.10、numpy 等
- 2D、3D AprilTag 追踪和机器人定位
- 使用 MegaTag1 的完整 3D 定位(机器人 GPS)
- 使用 MegaTag2 外部 IMU 融合的更高精度完整 3D 定位(机器人 GPS)
- 内置 IMU 融合以提高 MegaTag2 精度
- IMU 辅助模式,融合内置 IMU 和外部 IMU 或基于相机的偏航估计
- 使用检测器降采样可达 240FPS 性能
- Web 界面中的完整 3D 可视化器
- 120-240FPS 颜色块管道
- 神经网络目标检测管道
- 神经网络图像分类管道
- 条形码追踪管道
- 镜头对焦管道
- 低延迟流媒体取景器管道
- 内置 Charuco 内参标定界面,用于高精度视觉管道
- 内参标定可视化
- 内置低延迟 MJPEG 流媒体,可配置流方向
已知问题
- 启用降采样时,Hailo 加速的 AprilTag 帧率过低(将通过软件更新解决)
- 启用节流时,NetworkTables 的温度读数不准确(将通过软件更新解决)
1. 安装 Limelight 4
通孔安装
- 使用 1 1/4" #10-32 或 #10-24 螺丝配尼龙锁紧螺母
- 或者使用 38mm M4 螺栓配尼龙锁紧螺母
- 使用塑料垫圈以保护阳极氧化层
螺纹安装(背面)
- 2 个 M3 螺纹安装点
- 建议轻微涂抹螺纹锁固剂
2. Limelight 4 接线
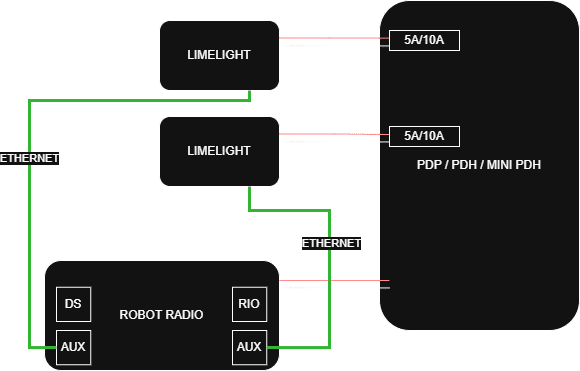
电源
- 从 Limelight 连接两根 18-20AWG 电线到 PDP、PDH 或 Mini PDP 的插槽
- 使用 5A 或 10A 断路器
- 不再支持 POE
- 注意:与之前的型号不同,LL4 可以在电池断开和再生制动事件中存活,无需专用 VRM
- (非必需)使用 Weidmuller 冷压端子以获得最佳效果(如图所示,20AWG 电线配 Weidmuller 20AWG 橙色冷压端子)
- 冷压端子:
- 低成本冷压端子压接工具:

以太网
- 从 Limelight 连接以太网线到机器人无线电
- 使用带绞合线的 Cat6 网线(理想情况下为 20AWG)
- 为以太网线添加应力释放装置
- 不再支持 POE
USB 刷写
- 要进入刷写模式,在通过 USB C 连接时按住配置按钮
- 刷写时,通过 USB 为 Limelight 4 供电是安全的
USB-Ethernet 接口
- Limelight 4 具有 USB-Ethernet 功能,可与 Windows、Linux 和 MacOS 即插即用连接。您可以通过 USB 使用 Web 界面和所有其他功能。
- 使用此接口时,Limelight 4 将超过大多数 USB 端口的功率额定值。建议在使用 USB-Ethernet 时通过 Weidmuller 端口为 Limelight 4 供电。
- Windows 上的 Limelight 4 配置界面(USB-Ethernet):http://172.28.0.1:5801
- Linux 上的 Limelight 4 配置界面(USB-Ethernet):http://172.29.0.1:5801
3. 访问 Web 界面
将 Limelight 4 连接到网络后:
- 启动机器人并将笔记本电脑连接到机器人网络
- 使用以下方法之一访问 Web 界面:
- 方法 1:打开 Limelight Hardware Manager 应用程序,扫描 Limelight,当它出现时双击
- 方法 2:打开 Web 浏览器并导航到
http://limelight.local:5801 - 方法 3:打开 Web 浏览器并导航到 Limelight 的静态 IP 地址加端口 5801(如果已配置)
- 方法 4(USB):通过 USB-C 连接并导航到:
- Windows:http://172.28.0.1:5801
- Linux/Mac:http://172.29.0.1:5801
连接后,您可以访问:
- 设置选项卡 - 配置队伍号、主机名和其他系统设置
- 视觉管道选项卡 - 设置和调整视觉处理管道
- 相机和准星选项卡 - 调整相机设置和准星参数
- 3D 可视化选项卡 - 查看实时 AprilTag 检测和定位
所有配置都通过此 Web 界面完成。更改会自动保存到 Limelight。
4. 更新 LimelightOS
警告
升级前请备份您的管道和脚本 - 它们将在此过程中被删除!
- 关闭 Limelight 电源
- 下载最新的 USB 驱动程序/RPIboot、Limelight OS 镜像和 Balena Flash 工具
- 在将 USB-C 线从笔记本电脑连接到 Limelight 时按住配置按钮
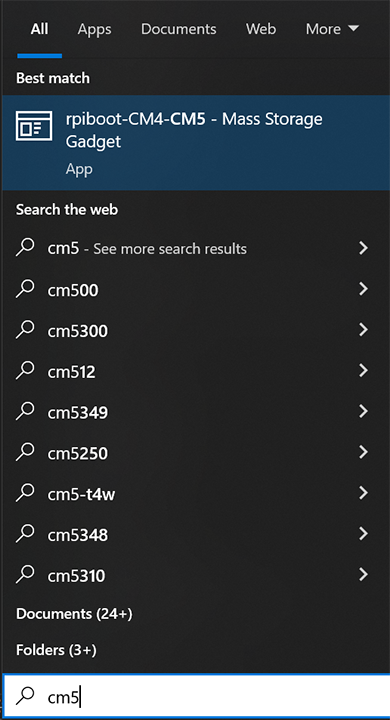
- 从 Windows 开始菜单运行 "rpiboot-CM4-CM5 - Mass Storage Gadget"
如果 RPIBoot 成功挂载了您的 Limelight,您应该看到以下内容。
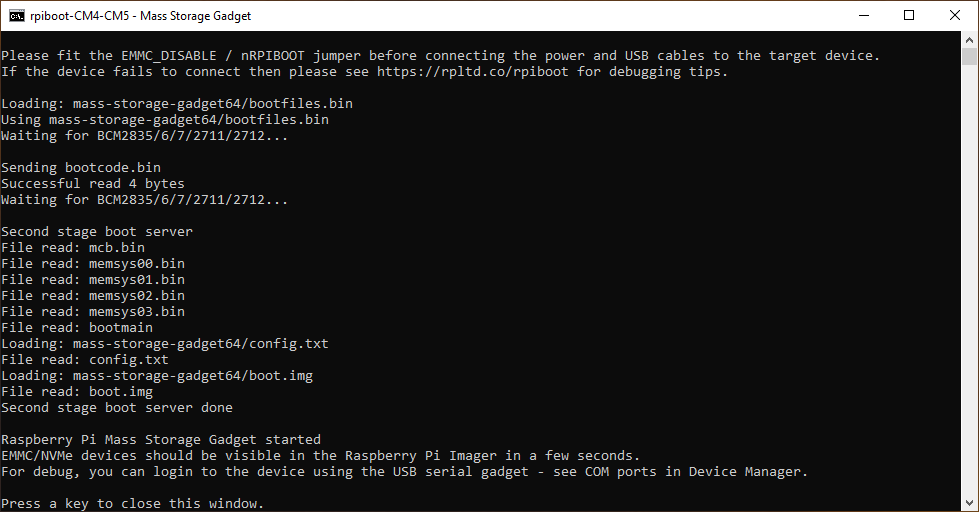
如果您看到其他内容,请拔下 USB 线,重新按下按钮,重新插入 USB 线,然后重启 rpiboot 工具。
- 以管理员身份运行 "Balena Etcher"
- 点击 "Flash From File" 并选择最新的 .zip 镜像
- 点击 "Select Target" 并在 "Drives" 菜单中选择 "mmcblk0 USB Device"
- 点击 "Flash" 并等待完成
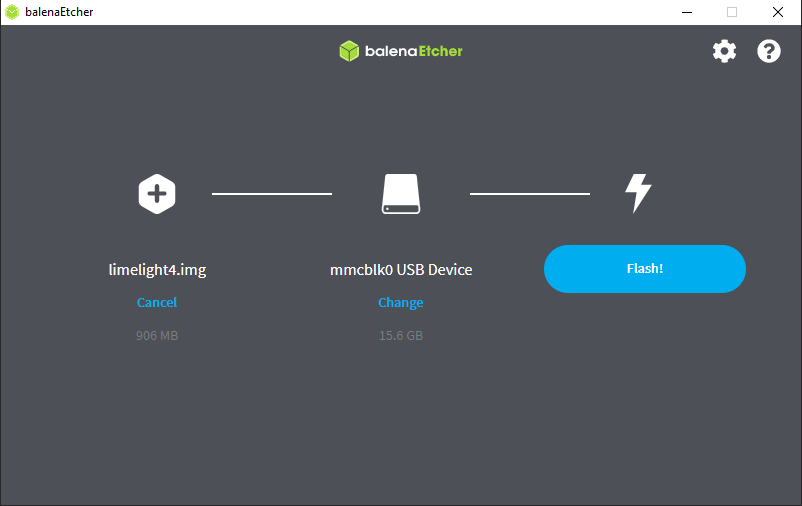
- 完成后拔下 USB 线
5. 对焦 Limelight 4
- 启动机器人
- 按照第 3 节所述连接到 Web 界面
- 点击 "Ignore NT pipeline index" 以启用管道切换,然后切换到管道 9
- 将管道类型设置为 "focus"
- 转到配置选项卡,将流质量调到最高
- 确保相机对准具有大量特征和对比度的物体,如 ARUCO 板、详细场景或西门子星
- 转动镜头以最大化屏幕上的对焦分数
- 对焦完成后,在镜头周围涂抹 3-8 点强力胶或强力胶凝胶
6. 网络配置
设置队伍号(FRC / Networktables 必需)
- 启动机器人并将笔记本电脑连接到机器人网络
- 打开 Limelight Hardware Manager,扫描 Limelight,然后双击出现的条目
- 或者导航到 http://limelight.local:5801
- 转到 "Settings" 选项卡
- 输入您的队伍号并点击 "Update Team Number"
设置唯一主机名(仅在使用多个 Limelight 的 FRC / Networktables 系统中需要)
- 如果您使用多个 Limelight,每个 Limelight 必须有唯一的主机名
- 在设置选项卡中,配置主机名并点击 "set hostname" 按钮
设置静态 IP(推荐,非必需)
- 将 "IP Assignment" 更改为 "Static"
- 将 IP 地址设置为 "10.TE.AM.11"
- 916 队使用 10.9.16.xx
- 9106 队使用 10.91.6.xx
- 9016 队使用 10.90.16.xx
- 将子网掩码设置为 "255.255.255.0"
- 将网关设置为 "10.TE.AM.1"
- 点击 "Update"
- 重启机器人电源
- 在 10.TE.AM.11:5801 访问配置面板,在 10.TE.AM.11:5800 访问相机流
- 如果您使用多个 Limelight,请为每个 Limelight 分配唯一的静态 IP 地址。网关和子网掩码在所有 Limelight 上应保持一致。
问:为什么我们推荐使用静态 IP 地址?
答:它可以缩短 Limelight 的启动时间数秒。 其次,在实际 FRC 比赛场地和赛事无线电固件中, 队伍历来在 DHCP 分配和 mDNS 响应器方面遇到问题。
我们建议在您的 robo-rio 和驾驶站上也设置静态 IP 地址。 所有这些设备上使用的网络设置可以在 此网页的下半部分找到
7. Limelight 4 热管理
可以通过在禁用时将 Throttle 参数设置为 100-200,在启用时设置为 0 来降低 Limelight 4 的热输出。 或者,您可以在禁用时切换到取景器管道。
8. Hailo AI 加速器模块安装(可选)
如果您有可选的 Hailo AI 加速器模块,请按照以下步骤安装:
- 将附带的导热垫贴到 Hailo SOC(片上系统)上
- 使用附带的 1.5mm 内六角扳手拆下三颗 8mm M2 外壳螺丝
- 将这些螺丝放在一边(它们带有螺纹锁固材料)
- 小心打开外壳(注意:相机线缆会限制您打开的程度)
- 将 Hailo 模块插入相应的插槽
- 无需螺丝固定 Hailo 模块
- 使用原来的三颗 8mm M2 螺丝重新安装外壳
- 安装 Hailo 模块后,请确保更新到最新版本的 LimelightOS
注意
Hailo 加速器模块无法使用 USB 供电。它需要稳定的 12V 电源(如主机器人电池)才能正常工作。
8. 故障排除
状态栏指示灯
- 慢速扫描(Cylon):当前管道未检测到目标
- 快速扫描(Cylon):当前管道检测到目标
- 慢速交替 LED 闪烁:硬件错误(相机线缆断开、传感器损坏等)
如果 limelight.local:5801 无法访问
- 检查是否安装了 Bonjour(Windows:添加/删除程序)
- 如果有两个 Bonjour 项目,请卸载 "bonjour print services"
- 如果缺少 Bonjour,请从下载页面安装
重置 IP 地址
- 在 Limelight 启动后按住配置按钮 10 秒
- 网络配置将在下次启动时重置为动态寻址