התחלה מהירה עם Limelight 3G

מפרט חומרה
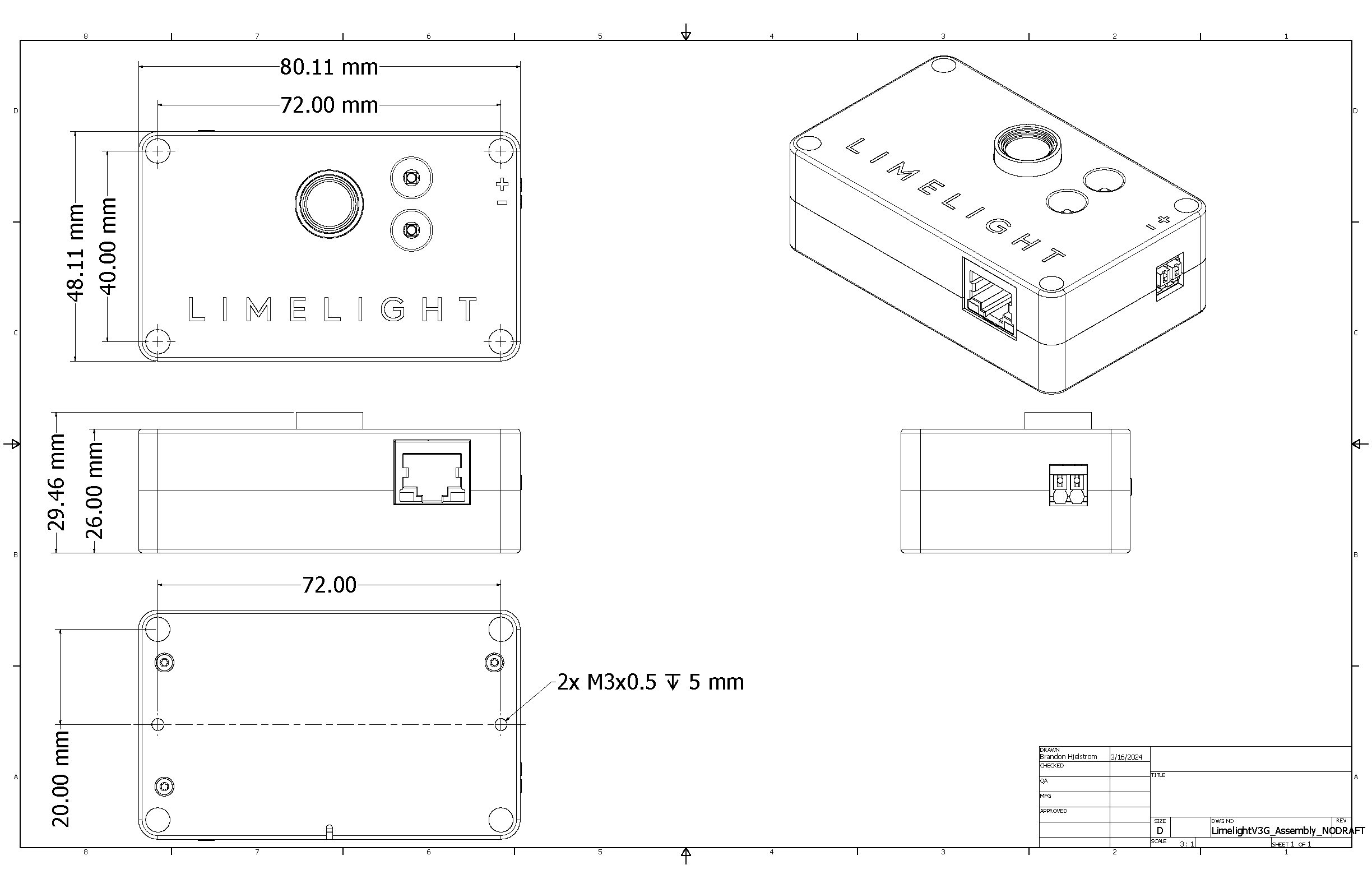
- טביעת רגל: 3.154in x 1.894in (80.11mm x 48.11mm)
- עובי: 1.160in (29.46mm)
- משקל: 0.24 lb
- הרכבה עם חורים #10 / M4
- חורי הרכבה מושחלים M3
- כניסת מתח: 4.1V-16V (4.1V-24V לגרסת הכפתור האדום, מקסימום מוחלט 30V)
- צריכת הספק מקסימלית 4W
- חיישן: OV9281 Global Shutter מונוכרום (1280x800 @ 120FPS, 640x480 @ 240FPS)
- עדשת M12 ניתנת להחלפה
- שדה ראייה אופקי 82 מעלות, שדה ראייה אנכי 56.2 מעלות
- מארז אלומיניום מלא עם אנודייז שחור
- יציאת Gigabit Ethernet RJ45
- יציאת USB C להדמיה וקישוריות
יכולות תוכנה (Limelight OS)
- ראייה ממוחשבת בביצועים גבוהים מוכנה לשימוש. לא נדרש ניסיון.
- ממשק משתמש מבוסס דפדפן לתצורת צינורות ראייה
- תמיכה ב-REST/HTTP, Websocket, NetworkTables, ModbusTCP ו-ROS
- קישוריות USB עם תמיכה בדרייבר USB-Ethernet מוכן לשימוש ב-Windows, Linux, MacOS ו-Android
- תמיכה בגרירה ושחרור של רשת נוירונים MobileNetSSD לזיהוי אובייקטים ב-20FPS
- חשיפה קבועה, רווח חיישן, רזולוציה וקצב פריימים ניתנים להגדרה.
- הגדרת 10 צינורות ראייה הניתנים להחלפה חמה:
- צינורות Python מותאמים אישית עם OpenCV 4.10, numpy ועוד.
- מעקב AprilTag דו-ממדי ותלת-ממדי ולוקליזציה של רובוט
- לוקליזציה תלת-ממדית מלאה (GPS רובוט) עם MegaTag1
- לוקליזציה תלת-ממדית מלאה בדיוק גבוה יותר (GPS רובוט) עם מיזוג IMU חיצוני עם MegaTag2
- ביצועים של עד 50fps ברזולוציה 640x480 עם הקטנת גלאי
- ויזואליזציה תלת-ממדית מלאה בממשק האינטרנט
- צינורות זיהוי כתמי צבע ב-120-240FPS
- צינורות זיהוי אובייקטים נוירוניים
- צינורות סיווג תמונות נוירוניים
- צינורות מעקב ברקוד�ים
- צינור מיקוד עדשה
- צינור Viewfinder לסטרימינג בהשהיה נמוכה
- ממשק כיול Charuco Intrinsics מובנה לצינורות ראייה בדיוק גבוה.
- ויזואליזציה של כיול Intrinsics
- סטרימינג MJPEG מובנה בהשהיה נמוכה. כיוון סטרים ניתן להגדרה
1. הרכבת Limelight 3G
הרכבה עם חורים
- השתמשו בברגים #10-32 או #10-24 באורך 1 1/4" עם אומים נעילה
- לחלופין, השתמשו בברגי M4 באורך 38mm עם אומים נעילה
- השתמשו בוושרים פלסטיים לשמירה על האנודייז
הרכבה מושחלת (צד אחורי)
- 2 נקודות הרכבה מושחלות M3
- שקלו מריחה קלה של נוזל נעילת ברגים (Vibratite או Loctite כחול)
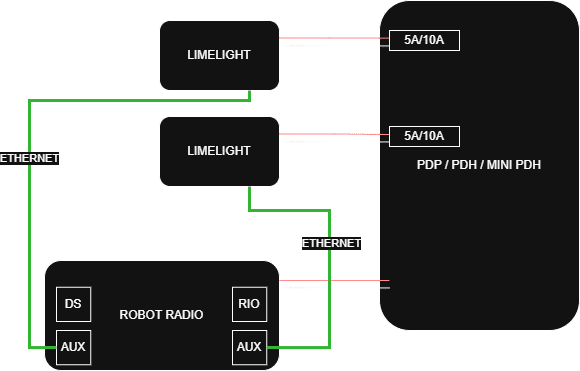
2. חיווט Limelight 3G
מתח
- העבירו שני חוטים 18-20AWG מה-Limelight שלכם לחריץ ב-PDP/PDH
- הוסיפו מפסק 5A לאותו חריץ
- חשוב: VRM ייעודי מומלץ מאוד עבור LL3G לפני 2025 (כפתור לבן) להגנה מפני פריקות עומס עקב בלימה רגנרטיבית של הנעת swerve + אירועי ניתוק סוללה
- (לא נדרש) השתמשו בפרולים Weidmuller לתוצאות מיטביות (בתמונה, חוט 20AWG עם פרולים כתומים 20AWG של Weidmuller)
- פרולים:
- כלי לחיצת פרולים בעלות נמוכה:

Ethernet
- העבירו כבל ethernet מה-Limelight שלכם לרדיו הרובוט
- השתמשו בכבלי Cat6 שזורים עם חוטים גמישים (אידיאלית 20AWG)
- הוסיפו הקלת מתח לכבל ה-ethernet שלכם
צריבה באמצעות USB
- כדי להיכנס למצב צריבה, החזיקו את כפתור התצורה בזמן חיבור דרך USB C
- בזמן צריבה, בטוח להזין מתח דרך USB.
ממשק USB-Ethernet
- ל-Limelight 3G יש פונקציונליות USB-Ethernet המאפשרת קישוריות מוכנה לשימוש עם Windows, Linux ו-MacOS. תוכלו להשתמש בממשק האינטרנט ובכל התכונות האחרות דרך USB.
- Limelight 3G בדרך כלל יתאים לתקציב ההספק של רוב יציאות ה-USB - תוכלו להשתמש ב-USB-Ethernet בבטחה ללא מתח חיצוני.
- ממשק תצורת Limelight ב-Windows (USB-Ethernet): http://172.28.0.1:5801
- ממשק תצורת Limelight ב-Linux (USB-Ethernet): http://172.29.0.1:5801
3. גישה לממשק האינטרנט
לאחר חיבור ה-Limelight 3G שלכם לרשת:
- הפעילו את הרובוט וחברו את המחשב הנייד לרשת הרובוט
- השתמשו באחת מהשיטות הבאות לגישה לממשק האינטרנט:
- שיטה 1: פתחו את אפליקציית Limelight Hardware Manager, סרקו Limelights, ולחצו לחיצה כפולה על ה-Limelight שלכם כשהוא מופיע
- שיטה 2: פתחו דפדפן אינטרנט ונווטו ל-
http://limelight.local:5801 - שיטה 3: פתחו דפדפן אינטרנט ונווטו לכתובת ה-IP הסטטית של ה-Limelight שלכם עם פורט 5801 (אם הוגדר)
- שיטה 4 (USB): התחברו דרך USB-C ונווטו ל:
- Windows: http://172.28.0.1:5801
- Linux/Mac: http://172.29.0.1:5801
לאחר ה�התחברות, תהיה לכם גישה ל:
- לשונית הגדרות - הגדרת מספר קבוצה, שם מארח והגדרות מערכת אחרות
- לשוניות צינור ראייה - הגדרה וכיוון צינורות עיבוד הראייה שלכם
- לשונית מצלמה וכוונת - התאמת הגדרות מצלמה ופרמטרי כוונת
- לשונית ויזואליזציה תלת-ממדית - צפייה בזיהוי AprilTag ולוקליזציה בזמן אמת
כל התצורה נעשית דרך ממשק אינטרנט זה. שינויים נשמרים אוטומטית ל-Limelight שלכם.
4. עדכון LimelightOS
caution
גבו את הצינורות והסקריפטים שלכם לפני השדרוג - הם יימחקו במהלך תהליך זה!
- כבו את ה-Limelight שלכם
- הורידו את דרייברי ה-USB, תמונת Limelight OS וכלי Balena Flash העדכניים ביותר
- החזיקו את כפתור התצורה על ה-Limelight שלכם, ובזמן ההחזקה, חבר�ו כבל USB->USB-C מהמחשב הנייד ל-Limelight שלכם (ה-Limelight יופעל אוטומטית)
- הריצו את "Balena Etcher" כמנהל מערכת
- ייתכן שייקח עד 20 שניות למחשב שלכם לזהות את המצלמה
- בחרו את תמונת ה-.zip העדכנית ביותר בתיקיית ההורדות שלכם
- בחרו התקן "Compute Module" בתפריט "Drives"
- לחצו על "Flash"
- לאחר השלמת הצריבה, נתקו את כבל ה-USB מה-Limelight שלכם
5. מיקוד ה-Limelight 3G שלכם
- חברו את ה-LL3G למחשב הנייד דרך USB (וודאו שהוא מורכב על הרובוט או על משטח)
- התחברו לממשק האינטרנט כמתואר בסעיף 3
- לחצו על "Ignore NT pipeline index" כדי לאפשר החלפת צינורות, והחליפו לצינור 9
- הגדירו את סוג הצינור ל-"focus"
- עברו ללשונית התצורה, והגדילו את איכות הסטרים למקסימום
- וודאו שהמצלמה מכוונת למשהו עם הרבה תכונות וניגודיות, כמו לוח ARUCO, סצנה מפורטת, או כוכב סימנס
- סובבו את העדשה כדי למקסם את ציון המיקוד על המסך
- לאחר המיקוד, מרחו 3-8 נקודות של דבק סופר או ג'ל דבק סופר סביב העדשה
6. תצורת רשת
הגדרת מספר הקבוצה (נדרש עבור FRC / Networktables)
- הפעילו את הרובוט וחברו את המחשב הנייד לרשת הרובוט
- פתחו את Limelight Hardware Manager, סרקו Limelights, ולחצו לחיצה כפולה על הערך שמופיע
- לחלופין, נווטו ל-http://limelight.local:5801
- עברו ללשונית "Settings"
- הזינו את מספר הקבוצה שלכם ולחצו על "Update Team Number"
הגדרת שם מארח ייחודי (נדרש רק עבור מערכות FRC / Networktables עם מספר Limelights)
- אם אתם משתמשים במספר Limelights, לכל Limelight חייב להיות שם מארח ייחודי
- בלשונית ההגדרות, הגדירו שם מארח ולחצו על כפתור "set hostname"
הגדרת IP סטטי (מומלץ, לא נדרש)
- שנו את "IP Assignment" ל-"Static"
- הגדירו כתובת IP ל-"10.TE.AM.11"
- קבוצה 916 משתמשת ב-10.9.16.xx
- קבוצה 9106 משתמשת ב-10.91.6.xx
- קבוצה 9016 משתמשת ב-10.90.16.xx
- הגדירו Netmask ל-"255.255.255.0"
- הגדירו Gateway ל-"10.TE.AM.1"
- לחצו על "Update"
- בצעו מחזור הפעלה לרובוט
- גשו לפאנל התצורה שלכם ב-10.TE.AM.11:5801 ולסטרים המצלמה ב-10.TE.AM.11:5800
- אם אתם משתמשים במספר Limelights, תנו לכל Limelight כתובת IP סטטית ייחודית
ש. למה אנחנו ממליצים על שימוש בכתובת IP סטטית?
ת. זה חוסך מספר שניות מזמן האתחול של Limelight. שנית, לקבוצות היו היסטורית בעיות עם הקצאת DHCP ומגיבי mDNS בשדות FRC אמיתיים ועם קושחת רדיו של אירועים.
אנחנו ממליצים להגדיר כתובות IP סטטיות גם ב-robo-rio ובתחנת הנהג שלכם. הגדרות הרשת לשימוש בכל ההתקנים הללו ניתן למצוא בחצי התחתון של דף אינטרנט זה
7. פתרון בעיות
מחווני נורית סטטוס
- נורית ירוקה: מהבהבת לאט (אין מטרות), מהבהבת מהר (מטרות זוהו)
- נורית צהובה: מהבהבת (אין IP סטטי), דולקת קבוע (IP סטטי הוקצה)
אם limelight.local:5801 לא עובד
- בדקו אם Bonjour מותקן (Windows: הוספה/הסרה של תוכניות)
- הסירו את "bonjour print services" אם יש לכם שני פריטי Bonjour
- התקינו Bonjour מדף ההורדות אם חסר
איפוס כתובת IP
- החזיקו את כפתור התצורה למשך 10 שניות לאחר שה-Limelight שלכם אותחל
- תצורת הרשת תתאפס לכתובות דינמיות באתחול הבא