כיול מצלמה באמצעות ChArUco
למה זה חשוב?
מצלמה מכוילת במלואה תספק מדידות דו-ממדיות ותלת-ממדיות מדויקות יותר. זה שימושי לכל משימה שאינה מבוססת על "סרווינג" לכוונת.
עם זאת, אנו ממליצים להשתמש בשיטת ה"סרווינג" ככל האפשר. היא מהירה, מדויקת ומתאימה למשימות כמו איסוף אובייקטים, כיוון ויישור למטרות. אל תדאגו לגבי כיול אלא אם קבעתם שאתם צריכים דיוק גבוה יותר. כל יחידת LL מגיעה עם כיול ברירת מחדל שיספק תוצאות טובות למדי עבור רוב מקרי השימוש
"סרווינג" הוא תהליך של סיבוב הרובוט שלכם עד שהמטרה מיושרת בצורה מושלמת עם "כוונת" הניתנת להגדרה. זוהי הדרך הקלה ביותר, ובמקרים רבים, האמינה ביותר לגשת לבעיות ראייה ברובוטיקה.
מהו כיול מצלמה?
כיול פנימי הוא תהליך קביעת שני המרכיבים הבאים:
1. מטריצת המצלמה
מטריצת המצלמה, המסומנת לעתים קרובות כ-K, היא מטריצה 3x3 שמתארת כיצד העדשה והחיישן הופכים את העולם התלת-ממדי לתמונה דו-ממדית.
[fx 0 cx]
[0 fy cy]
[0 0 1]
cx ו-cy הם קואורדינטות הנקודה הראשית / הפיקסל הראשי. הנקודה הראשית / הפיקסל הראשי הוא הפיקסל שמיושר ישירות עם הציר האופטי / מרכז העדשה. במהלך הייצור, עדשת המצלמה כמעט אף פעם לא מיושרת בצורה מושלמת עם מרכז חיישן התמונה. חיוני שנבין איזה פיקסל הוא פיקסל ה"מרכז" האמיתי
fx ו-fy הם אורכי מוקד מחושבים בפיקסלים. fx ו-fy עוזרים לנו להבין את שדה הראייה / רמת הזום של המצלמה.
2. מקדמי עיוות
אנו מחשבים 5 מקדמי עיוות:
[k1, k2, p1, p2, k3]
k1, k2, k3 הם מקדמי עיוות רדיאלי שגורמים לקווים ישרים להיראות מעוקלים.
p1, p2 הם מקדמי עיוות טנגנציאלי שמתרחשים כאשר העדשה אינה מקבילה למישור התמונה
ביצוע כיול ChArUco
כיול ChArUco עם Limelight תוכנן להיות חלק ועמיד ככל האפשר. קראו את השלבים הבאים, ואז צפו בסרטון למטה כדי ללמוד כיצד לכייל את המצלמה שלכם לדיוק מוגבר.
אתם צריכים לכייל רק ברזולוציה אחת (אנו ממליצים על 1280x960 עבור LL3 ו-1280x800 עבור LL3G). הפרמטרים הפנימיים מותאמים אוטומטית לרזולוציה שנבחרה בצינור שלכם, ומקדמי העיוות אינם תלויי רזולוציה בהינתן יחס גובה-רוחב ושדה ראייה קבועים. צינורות זום חומרה וצינורות 5 מגה-פיקסל הם הצינורות היחידים שלא ישתמשו בכיולים מותאמים אישית.
הכנת הלוח
אתם יכולים להשתמש בכל מסך מחשב נייד לכיול המצלמה שלכם. עם זאת, לדיוק מרבי, אנו ממליצים לרכוש את הלוח הגס בגודל 800mmx600mm מ-calib.io
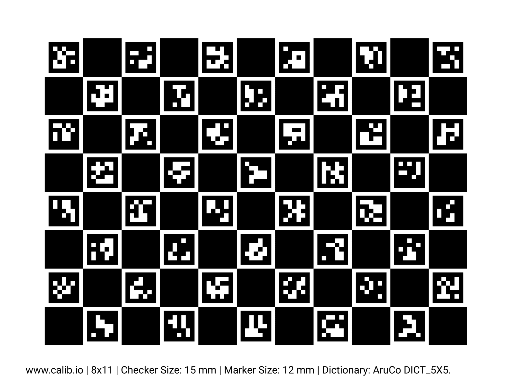
- הדפיסו לוח כיול ChArUco או השתמשו בתמונה של לוח על מסך מחשב נייד או מחשב גדול. השתמשו בלוח שלנו מדף ההורדות, או צרו לוח משלכם.
- מצאו את ה"רוחב" של הרשת על ידי חיבור המספר הכולל של ריבועים שחורים והמספר הכולל של סמני ArUco בשורה אחת (11 עבור לוח הכיול של Limelight כברירת מחדל).
- מצאו את ה"גובה" של הרשת על ידי חיבור המספר הכולל של ריבועים שחורים והמספר הכולל של סמני ArUco בעמודה אחת (8 עבור לוח הכיול של Limelight כברירת מחדל).
- אשרו את מידות "גודל הריבוע" ו"גודל הסמן" על ידי מדידת אורכי הצלעות של ריבוע וסמן במילימטרים.
- מידות גודל הריבוע וגודל הסמן הן קריטיות, לכן השתמשו בקליבר.
- שימו לב לסוג המילון. הלוח כברירת מחדל מדף ההורדות משתמש במילון 5x5_100.
צילום תמונות כיול
- ודאו שהלוח שלכם שטוח ככל האפשר.
- אין לבצע כיול אם הלוח שלכם אינו שטוח. אתם יכולים לרכוש לוחות מיוחדים מ-calib.io, או לחבר את הלוח המודפס שלכם ללוח קליפס.
- הפעילו את הרובוט שלכם וגשו לממשק האינטרנט של Limelight.
- צרו צינור AprilTag ברזולוציה 1280x960.
- מחקו את כל התמונות השמורות על ידי שינוי סוג מקור ה"קלט" מ"Camera" ל"Snapshot" ולחיצה על "Delete all snapshots".
- שנו את סוג מקור ה"קלט" בחזרה ל"Camera".
- צלמו לפחות 25 תמונות של לוח ה-ChArUco להתחלה. ברגע שתכירו את התהליך, תרצו לחזור ולצלם סך הכל לפחות 50 תמונות.
- היתרון העיקרי של כיול ChArUco על פני כיול לוח שחמט סטנדרטי הוא שהוא עובד גם אם רק חלק מהלוח נראה למצלמה. חשוב לנצל יתרון זה.
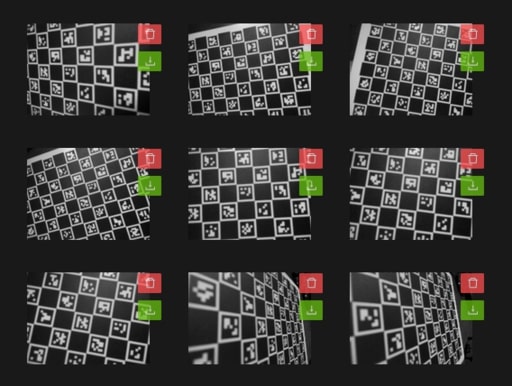
- התמונות שלכם צריכות להכיל תערובת טובה של התכונות הבאות:
- הלוח שלכם משתרע על אזורים גדולים של התמונה.
- הלוח שלכם מתרחב מעבר לפחות קצה אחד או פינה אחת של התמונה (זה יעזור לחשב עיוות סביב קצוות התמונות).
- הלוח שלכם ממוקם לעתים קרובות כך שיש לו עיוות פרספקטיבה (הלוח לא צריך להיות מקביל למישור התמונה).
- שאפו למגוון רחב במיקומי הלוח, פרספקטיבות וכיסוי.
- 50% מהתמונות שלכם צריכות להדגים קיצור פרספקטיבי משמעותי. זהו האפקט של סמנים קרובים יותר שנראים גדולים יותר מסמנים רחוקים. התמונה הראשונה והאחרונה בצילום המסך הבא מדגימות קיצור פרספקטיבי
כיול
- נווטו ללשונית "Calibration". זו הלשונית השלישית בסרגל הצד האנכי.
- הזינו את חמשת הערכים שנמצאו בשלב "הכנת הלוח".
- לחצו על כפתור "Calibrate with Snapshots". התהליך עשוי לקחת דקה או שתיים להשלמה.
- עם הצלחה, כרטיס "Latest Calibration Result" יציג את תוצאת הכיול האחרונה.
- בדקו את כרטיס "Latest Calibration Result" לתוצאה סבירה עם שגיאת הקרנה מחדש נמוכה (באופן אידיאלי פחות מ-1).
- הורידו את תוצאת הכיול האחרונה והעלו אותה לחריץ הכיול "custom - file".
- כעת אתם אמורים לראות שלושה כרטיסי תוצאות כיול מאוכלסים.
- שנו את "preferred calibration" שלכם ל-"custom - file" כדי להשתמש בתוצאת הכיול המותאמת אישית שלכם. כל הצינורות ישתמשו בתוצאת הכיול שלכם.
- שקלו לצלם עוד צילומי מסך ולכייל מחדש ברגע שתכירו את התהליך.