Início Rápido do Limelight 4

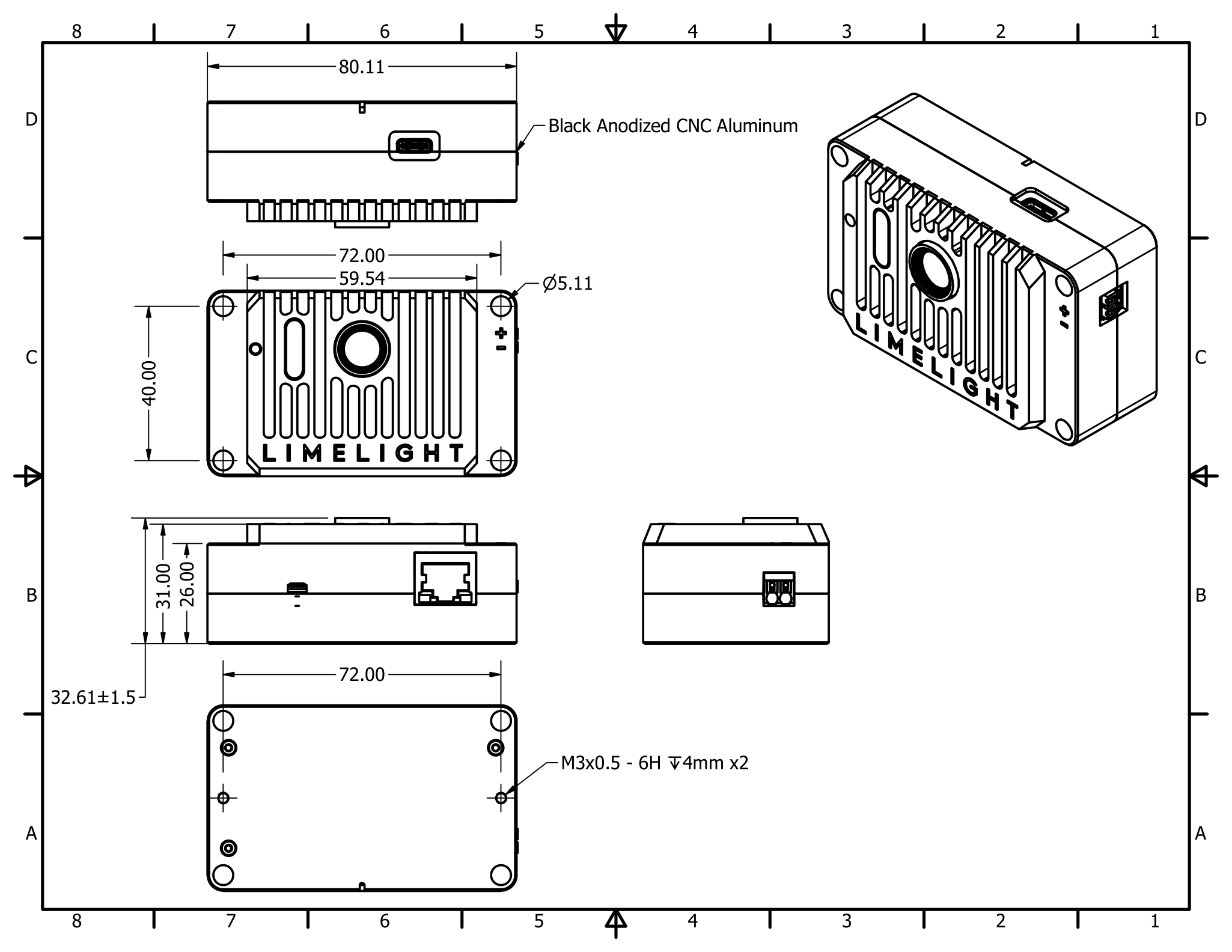
Especificações de Hardware
- Dimensões: 3.154in x 1.894in (80.11mm x 48.11mm)
- Espessura: 1.160in (29.46mm)
- Massa: 0.3 lb
- Montagem com Furos Passantes #10 / M4
- Furos de montagem roscados M3
- Entrada de Energia: Buck-Boost com operação de 5V-26V (3.5V - 35V máximo absoluto)
- Supressão de transientes aprimorada para aplicações de robótica
- Consumo máximo de energia de 12W
- Sensor: OV9281 Global Shutter Monocromático (1280x800 @ 120FPS, 640x400 @ 240FPS)
- Kit de Upgrade IMX462 com Iluminação Traseira em breve.
- Lente M12 Substituível
- 82 graus FOV Horizontal, 56.2 graus FOV Vertical
- Gabinete Todo em Alumínio com Anodização Preta
- Porta RJ45 Gigabit Ethernet (POE não é mais suportado)
- Porta de Entrada de Energia Weidmuller
- Porta USB C para Imagem e Conectividade
- IMU Interno
- Suporte ao Acelerador de IA Hailo 8 com Porta M.2 A+E Key interna.
Capacidades de Software (Limelight OS)
- Visão de alto desempenho plug-and-play. Nenhuma experiência necessária.
- Interface de usuário baseada em navegador auto-hospedada para configuração de pipeline de visão
- Suporte a REST/HTTP, Websocket, NetworkTables, ModbusTCP e ROS
- Conectividade USB com suporte a driver USB-Ethernet plug-and-play no Windows, Linux, MacOS e Android
- Suporte a rede neural de detecção de objetos MobileNetSSD a 20FPS com arrastar e soltar (Inferência por CPU)
- Suporte a rede neural de detecção de objetos YoloV8 a 80FPS com arrastar e soltar (Requer Hailo-8)
- Exposição fixa configurável, ganho do sensor, resolução e taxa de quadros.
- Configure 10 Pipelines de Visão com Troca Rápida:
- Pipelines Python Personalizados com OpenCV 4.10, numpy, etc.
- Rastreamento de AprilTag 2D, 3D e Localização de Robô
- Localização 3D Completa (GPS do Robô) com MegaTag1
- Localização 3D Completa de Alta Precisão (GPS do Robô) com Fusão de IMU Externo com MegaTag2
- Fusão de IMU Interno para MegaTag2 de maior precisão
- Modos de Assistência IMU para fundir IMU interno e IMU Externo ou Estimativa de Yaw Baseada em Câmera
- Desempenho de até 240FPS com Redução de Escala do detector
- Visualizador 3D Completo na interface web
- Pipelines de Blob de Cor a 120-240FPS
- Pipelines de Detecção Neural de Objetos
- Pipelines de Classificação Neural de Imagens
- Pipelines de Rastreamento de Código de Barras
- Pipeline de Foco de Lente
- Pipeline de visualização para streaming de baixa latência
- Interface de Calibração de Intrínsecos Charuco integrada para pipelines de visão de alta precisão.
- Visualização de Calibração de Intrínsecos
- Streaming MJPEG de baixa latência integrado. Orientação de stream configurável
Problemas Conhecidos
- As taxas de quadros de Apriltag Aceleradas por Hailo estão muito baixas quando a redução de escala está habilitada (Será resolvido com uma atualização de SW)
- Leituras de Temperatura do NetworkTables não são precisas enquanto o throttling está habilitado (Será resolvido com uma atualização de SW)
1. Montando o Limelight 4
Montagem com Furos Passantes
- Use parafusos #10-32 ou #10-24 de 1 1/4" com porcas nylock
- Alternativamente, use parafusos M4 de 38mm com porcas nylock
- Use arruelas plásticas para preservar a anodização
Montagem Roscada (Parte Traseira)
- 2x pontos de montagem roscados M3
- Considere aplicação leve de trava-rosca
2. Fiação do Limelight 4
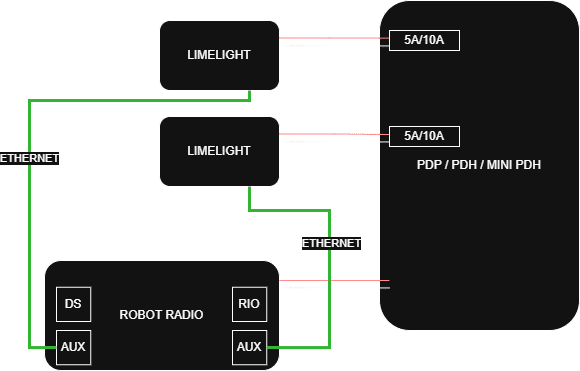
Energia
- Passe dois fios de 18-20AWG do seu Limelight para um slot no seu PDP, PDH ou Mini PDP
- Use um disjuntor de 5A ou 10A
- POE não é mais suportado
- Nota: Diferente dos modelos anteriores, o LL4 pode sobreviver a eventos de desconexão de bateria e frenagem regenerativa sem necessitar de um VRM dedicado
- (Não Obrigatório) Use terminais Weidmuller para melhores resultados (Na imagem, fio 20AWG com terminais Weidmuller 20AWG laranja)
- Terminais:
- Ferramentas de crimpagem de terminais de baixo custo:

Ethernet
- Passe um cabo ethernet do seu Limelight para o rádio do seu robô
- Use cabos Cat6 trançados com fios flexíveis (idealmente 20AWG)
- Adicione um alívio de tensão ao seu cabo ethernet
- POE não é mais suportado
Flash via USB
- Para entrar no modo de flash, segure o botão de configuração enquanto conecta via USB C
- Durante o flash, é seguro alimentar o Limelight 4 via USB.
Interface USB-Ethernet
- O Limelight 4 tem funcionalidade USB-Ethernet que permite conectividade plug-and-play com Windows, Linux e MacOS. Você pode usar a interface web e todos os outros recursos via USB.
- Ao usar esta interface, o Limelight 4 excederá a classificação de potência da maioria das portas USB. É recomendado alimentar o Limelight 4 pela porta weidmuller enquanto usa USB-Ethernet.
- Interface de configuração do Limelight 4 no Windows (USB-Ethernet): http://172.28.0.1:5801
- Interface de configuração do Limelight 4 no Linux (USB-Ethernet): http://172.29.0.1:5801
3. Acessando a Interface Web
Após conectar seu Limelight 4 à sua rede:
- Ligue seu robô e conecte seu laptop à rede do seu robô
- Use um destes métodos para acessar a interface web:
- Método 1: Abra o aplicativo Limelight Hardware Manager, procure por Limelights e clique duas vezes no seu Limelight quando ele aparecer
- Método 2: Abra um navegador web e navegue para
http://limelight.local:5801 - Método 3: Abra um navegador web e navegue para o endereço IP estático do seu Limelight com a porta 5801 (se configurado)
- Método 4 (USB): Conecte via USB-C e navegue para:
- Windows: http://172.28.0.1:5801
- Linux/Mac: http://172.29.0.1:5801
Uma vez conectado, você terá acesso a:
- Aba de Configurações - Configure número da equipe, hostname e outras configurações do sistema
- Abas de Pipeline de Visão - Configure e ajuste seus pipelines de processamento de visão
- Aba de Câmera e Mira - Ajuste configurações da câmera e parâmetros da mira
- Aba de Visualização 3D - Visualize detecção de AprilTag e localização em tempo real
Toda a configuração é feita através desta interface web. As alterações são salvas automaticamente no seu Limelight.
4. Atualizando o LimelightOS
Faça backup dos seus pipelines e scripts antes de atualizar - eles serão apagados durante este processo!
- Desligue seu Limelight
- Baixe os mais recentes drivers USB/RPIboot, imagem do Limelight OS e ferramenta Balena Flash
- Segure o botão de configuração enquanto conecta um cabo USB-C do seu laptop ao seu Limelight
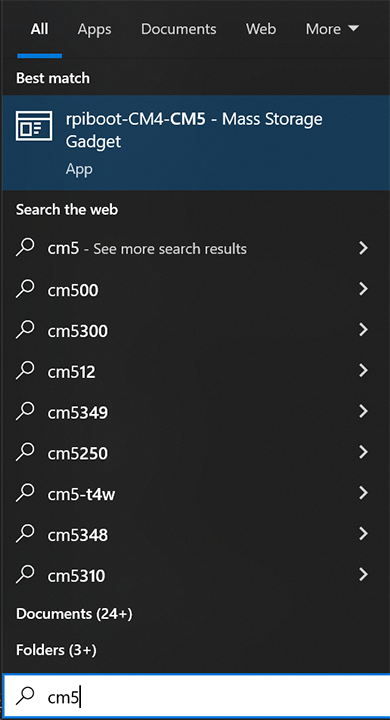
- Execute "rpiboot-CM4-CM5 - Mass Storage Gadget" do menu Iniciar do Windows
Você deve ver o seguinte se o RPIBoot montou seu Limelight com sucesso.
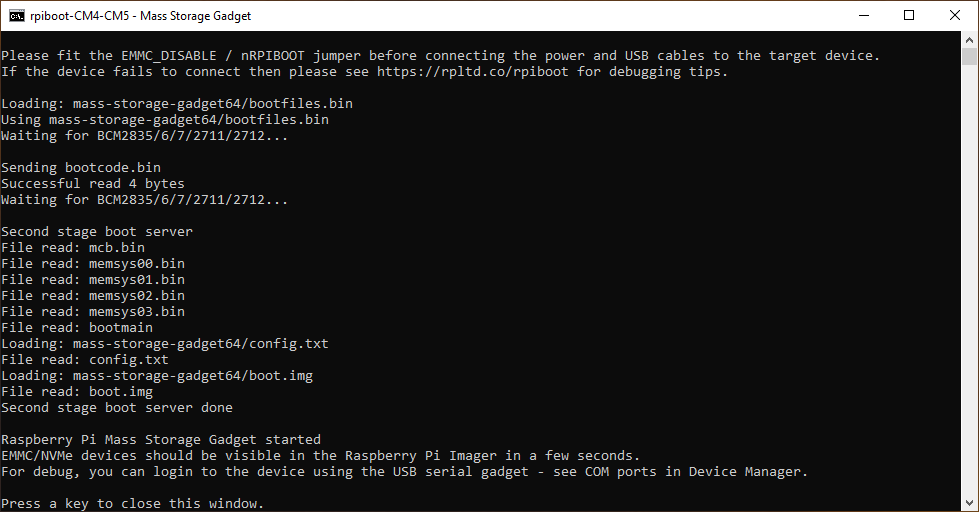
Se você ver qualquer outra coisa, remova o cabo USB, pressione o botão novamente, reinsira o cabo USB e reinicie o utilitário rpiboot.
- Execute "Balena Etcher" como administrador
- Clique em "Flash From File" e selecione a imagem .zip mais recente
- Clique em "Select Target" e escolha "mmcblk0 USB Device" no menu "Drives"
- Clique em "Flash" e aguarde a conclusão
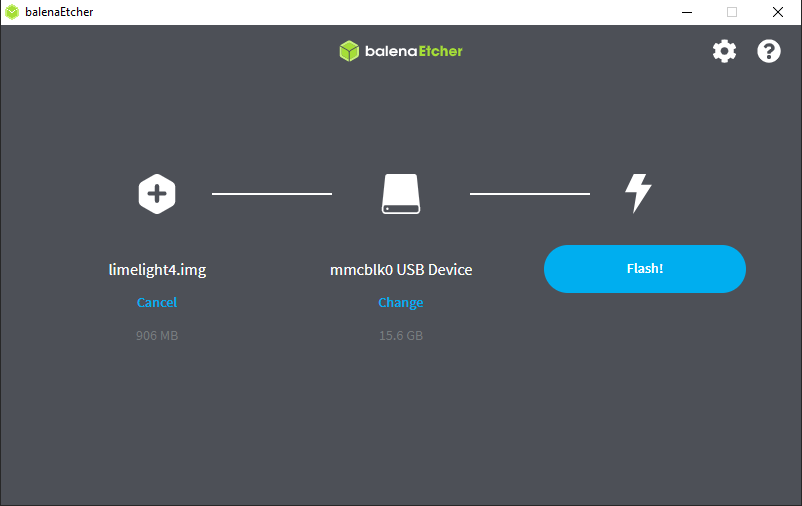
- Remova o cabo USB quando terminar
5. Focando Seu Limelight 4
- Ligue seu robô.
- Conecte-se à interface web conforme descrito na seção 3
- Clique em "Ignore NT pipeline index" para habilitar a troca de pipeline e mude para o pipeline 9
- Defina o tipo de pipeline para "focus"
- Vá para a aba de configuração e aumente a qualidade do stream para o máximo
- Certifique-se de que a câmera está apontada para algo com muitos detalhes e contraste, como uma placa ARUCO, uma cena detalhada ou uma estrela de Siemens
- Gire a lente para maximizar a pontuação de foco na tela
- Uma vez focado, aplique 3-8 pontos de super cola ou gel de super cola ao redor da lente
6. Configuração de Rede
Configurando o Número da Equipe (Obrigatório para FRC / Networktables)
- Ligue seu robô e conecte seu laptop à rede do seu robô
- Abra o Limelight Hardware Manager, procure por Limelights e clique duas vezes na entrada que aparecer.
- Alternativamente, navegue para http://limelight.local:5801
- Vá para a aba "Settings"
- Digite o número da sua equipe e pressione "Update Team Number"
Configurando um Hostname Único (Apenas Obrigatório para sistemas FRC / Networktables com múltiplos Limelights)
- Se você está usando múltiplos Limelights, cada Limelight deve ter um hostname único
- Na aba de configurações, configure um hostname e clique no botão "set hostname".
Configurando IP Estático (Recomendado, não obrigatório)
- Mude "IP Assignment" para "Static"
- Defina o endereço IP para "10.TE.AM.11"
- Equipe 916 usa 10.9.16.xx
- Equipe 9106 usa 10.91.6.xx
- Equipe 9016 usa 10.90.16.xx
- Defina Netmask para "255.255.255.0"
- Defina Gateway para "10.TE.AM.1"
- Clique em "Update"
- Reinicie seu robô
- Acesse seu painel de configuração em 10.TE.AM.11:5801 e o stream da câmera em 10.TE.AM.11:5800
- Se você está usando múltiplos Limelights, dê a cada Limelight um endereço IP estático único. Gateways e netmasks devem ser os mesmos em todos os Limelights.
P. Por que recomendamos o uso de um endereço IP estático?
R. Isso reduz vários segundos do tempo de inicialização do Limelight. Segundo, as equipes historicamente tiveram problemas com atribuição DHCP e respondedores mDNS em campos FRC reais e com firmware de rádio de eventos.
Recomendamos configurar endereços IP estáticos no seu robo-rio e driverstation também. As configurações de rede para usar em todos esses dispositivos podem ser encontradas na metade inferior de esta página web
7. Gerenciamento Térmico do Limelight 4
A saída térmica do Limelight 4 pode ser reduzida configurando o parâmetro Throttle para 100-200 enquanto desabilitado, e para 0 enquanto habilitado. Alternativamente, você pode mudar para um pipeline de visualização enquanto desabilitado.
8. Instalação do Módulo Acelerador de IA Hailo (Opcional)
Se você tem o módulo acelerador de IA Hailo opcional, siga estes passos para instalá-lo:
- Anexe a almofada térmica incluída ao SOC Hailo (System on Chip)
- Use a chave Allen de 1.5mm incluída para remover os três parafusos M2 de 8mm do gabinete
- Guarde estes parafusos (eles têm material de trava-rosca)
- Abra cuidadosamente o gabinete (nota: o cabo da câmera limitará o quanto você pode abri-lo)
- Insira o módulo Hailo no slot apropriado
- Nenhum parafuso é necessário para fixar o módulo Hailo
- Recoloque o gabinete usando os três parafusos M2 de 8mm originais
- Após instalar o módulo Hailo, certifique-se de atualizar para a versão mais recente do LimelightOS.
O Módulo Acelerador Hailo não funciona com energia USB. Ele requer uma fonte de energia estável de 12V, como a bateria principal do robô, para funcionar corretamente.
8. Solução de Problemas
Indicadores da Barra de Status
- Cylon Lento (Varredura): Nenhum alvo detectado pelo pipeline atual
- Cylon Rápido (Varredura): Alvos detectados pelo pipeline atual
- Piscar Alternado Lento de LED: Erro de hardware (cabo da câmera desconectado, dano ao sensor, etc.)
Se limelight.local:5801 não funcionar
- Verifique se você tem o Bonjour instalado (Windows: adicionar/remover programas)
- Desinstale "bonjour print services" se você tiver dois itens Bonjour
- Instale o Bonjour da página de Downloads se estiver faltando
Resetar endereço IP
- Segure o botão de configuração por 10 segundos após seu Limelight ter inicializado
- A configuração de rede será resetada para endereçamento dinâmico na próxima inicialização