Limelight 3G Hızlı Başlangıç

Donanım Özellikleri
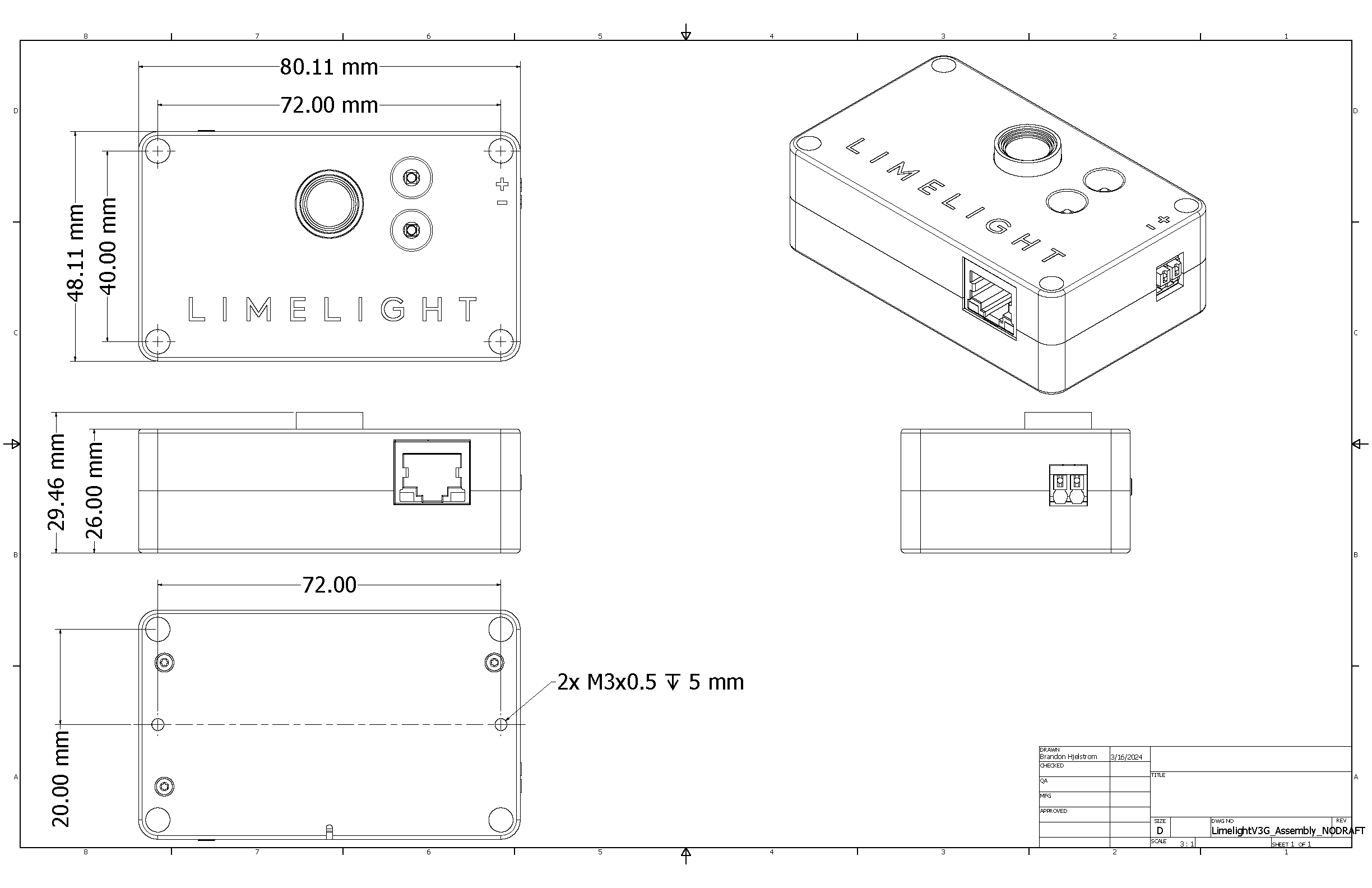
- Boyutlar: 3.154in x 1.894in (80.11mm x 48.11mm)
- Kalınlık: 1.160in (29.46mm)
- Ağırlık: 0.24 lb
- #10 / M4 Geçmeli Montaj
- M3 Dişli montaj delikleri
- Güç Girişi: 4.1V-16V (kırmızı butonlu varyant için 4.1V-24V, mutlak maksimum 30V)
- Maksimum 4W güç tüketimi
- Sensör: OV9281 Global Shutter Monokrom (1280x800 @ 120FPS, 640x480 @ 240FPS)
- Değiştirilebilir M12 Lens
- 82 derece Yatay FOV, 56.2 derece Dikey FOV
- Siyah Anodize, Tamamen Alüminyum Kasa
- Gigabit Ethernet RJ45 Portu
- USB C Görüntüleme ve Bağlantı Portu
Yazılım Özellikleri (Limelight OS)
- Tak-çalıştır yüksek performanslı görüntü işleme. Deneyim gerektirmez.
- Görüntü işleme hattı yapılandırması için kendi kendine barındırılan tarayıcı tabanlı arayüz
- REST/HTTP, Websocket, NetworkTables, ModbusTCP ve ROS desteği
- Windows, Linux, MacOS ve Android'de tak-çalıştır USB-Ethernet Sürücü desteği ile USB bağlantısı
- Sürükle-bırak 20FPS MobileNetSSD nesne algılayıcı sinir ağı desteği
- Yapılandırılabilir sabit pozlama, sensör kazancı, çözünürlük ve kare hızı.
- 10 Anında Değiştirilebilir Görüntü İşleme Hattı Yapılandırın:
- OpenCV 4.10, numpy vb. ile Özel Python Hatları
- 2D, 3D AprilTag Takibi ve Robot Lokalizasyonu
- MegaTag1 ile Tam 3D Lokalizasyon (Robot GPS)
- MegaTag2 ile Harici IMU Füzyonu kullanarak Yüksek Doğruluklu Tam 3D Lokalizasyon (Robot GPS)
- Algılayıcı Ölçek Küçültme ile 640x480'de 50fps'e kadar performans
- Web arayüzünde Tam 3D Görselleştirici
- 120-240FPS Renk Blob hatları
- Sinir Ağı Nesne Algılama Hatları
- Sinir Ağı Görüntü Sınıflandırma Hatları
- Barkod Takip Hatları
- Lens Odaklama Hattı
- Düşük gecikmeli akış için Vizör hattı
- Yüksek doğruluklu görüntü işleme hatları için Dahili Charuco İç Kalibrasyon arayüzü.
- İç Kalibrasyon görselleştirmesi
- Dahili düşük gecikmeli MJPEG Akışı. Yapılandırılabilir akış yönü
1. Limelight 3G Montajı
Geçmeli Montaj
- 1 1/4" #10-32 veya #10-24 vidalar ve nylock somunlar kullanın
- Alternatif olarak, 38mm M4 cıvatalar ve nylock somunlar kullanın
- Anodizasyonu korumak için plastik pul kullanın
Dişli Montaj (Arka Taraf)
- 2x M3 dişli montaj noktası
- Hafif diş kilidi uygulaması düşünün (Vibratite veya mavi Loctite)
2. Limelight 3G Kablolama
Güç
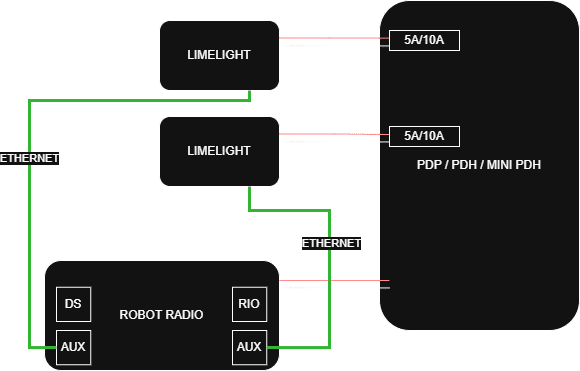
- Limelight'ınızdan PDP/PDH'nizdeki bir yuvaya iki adet 18-20AWG kablo çekin
- Aynı yuvaya 5A sigorta ekleyin
- Önemli: 2025 öncesi LL3G (beyaz butonlu) için swerve sürüş rejeneratif frenleme + akü bağlantı kesintisi olaylarından kaynaklanan yük boşalmalarına karşı koruma için özel bir VRM şiddetle tavsiye edilir
- (Gerekli Değil) Optimal sonuçlar için Weidmuller kılıfları kullanın (Resimde, 20AWG Kablo ile Weidmuller 20AWG Turuncu kılıflar)
- Kılıflar:
- Düşük maliyetli Kılıf sıkma aletleri:

Ethernet
- Limelight'ınızdan robot radyonuza bir ethernet kablosu çekin
- Bükümlü, örgülü telli Cat6 kablolar kullanın (ideal olarak 20AWG)
- Ethernet kablonuza gerilim giderici ekleyin
USB Yazma
- Yazma moduna girmek, USB C üzerinden bağlarken yapılandırma düğmesini basılı tutun
- Yazma sırasında USB üzerinden güç vermek güvenlidir.
USB-Ethernet Arayüzü
- Limelight 3G, Windows, Linux ve MacOS ile tak-çalıştır bağlantı sağlayan USB-Ethernet işlevselliğine sahiptir. Web arayüzünü ve diğer tüm özellikleri USB üzerinden kullanabilirsiniz.
- Limelight 3G genellikle çoğu USB portunun güç bütçesine uyar - harici güç olmadan USB-Ethernet'i güvenle kullanabilirsiniz.
- Windows'ta Limelight yapılandırma arayüzü (USB-Ethernet): http://172.28.0.1:5801
- Linux'ta Limelight yapılandırma arayüzü (USB-Ethernet): http://172.29.0.1:5801
3. Web Arayüzüne Erişim
Limelight 3G'nizi ağınıza bağladıktan sonra:
- Robotunuzu açın ve dizüstü bilgisayarınızı robotunuzun ağına bağlayın
- Web arayüzüne erişmek için şu yöntemlerden birini kullanın:
- Yöntem 1: Limelight Hardware Manager uygulamasını açın, Limelight'ları tarayın ve göründüğünde Limelight'ınıza çift tıklayın
- Yöntem 2: Bir web tarayıcısı açın ve
http://limelight.local:5801adresine gidin - Yöntem 3: Bir web tarayıcısı açın ve Limelight'ınızın statik IP adresine 5801 portu ile gidin (yapılandırılmışsa)
- Yöntem 4 (USB): USB-C ile bağlanın ve şu adrese gidin:
- Windows: http://172.28.0.1:5801
- Linux/Mac: http://172.29.0.1:5801
Bağlandığınızda şunlara erişebilirsiniz:
- Ayarlar sekmesi - Takım numarası, ana bilgisayar adı ve diğer sistem ayarlarını yapılandırın
- Görüntü İşleme Hattı sekmeleri - Görüntü işleme hatlarınızı kurun ve ayarlayın
- Kamera ve Artı İşareti sekmesi - Kamera ayarlarını ve artı işareti parametrelerini ayarlayın
- 3D Görselleştirme sekmesi - Gerçek zamanlı AprilTag algılama ve lokalizasyonu görüntüleyin
Tüm yapılandırma bu web arayüzü üzerinden yapılır. Değişiklikler otomatik olarak Limelight'ınıza kaydedilir.
4. LimelightOS Güncelleme
uyarı
Yükseltmeden önce hatlarınızı ve betiklerinizi yedekleyin - bu işlem sırasında silinecekler!
- Limelight'ınızı kapatın
- En son USB sürücülerini, Limelight OS imajını ve Balena Flash aracını indirin
- Limelight'ınızdaki yapılandırma düğmesini basılı tutun ve basılı tutarken dizüstü bilgisayarınızdan Limelight'ınıza bir USB->USB-C kablosu bağlayın (Limelight'ınız otomatik olarak açılacaktır)
- "Balena Etcher"ı yönetici olarak çalıştırın
- Makinenizin kamerayı tanıması 20 saniyeye kadar sürebilir
- İndirilenler klasörünüzdeki en son .zip imajını seçin
- "Drives" menüsünde bir "Compute Module" cihazı seçin
- "Flash"a tıklayın
- Yazma tamamlandığında, USB kablosunu Limelight'ınızdan çıkarın
5. Limelight 3G Odaklama
- LL3G'nizi USB üzerinden dizüstü bilgisayarınıza bağlayın (robotunuza veya bir yüzeye monte edildiğinden emin olun)
- Bölüm 3'te açıklandığı gibi web arayüzüne bağlanın
- Hat değiştirmeyi etkinleştirmek için "Ignore NT pipeline index"e tıklayın ve hat 9'a geçin
- Hat türünü "focus" olarak ayarlayın
- Yapılandırma sekmesine gidin ve akış kalitesini maksimuma çıkarın
- Kameranın ARUCO tahtası, detaylı bir sahne veya siemens yıldızı gibi çok sayıda özellik ve kontrast içeren bir şeye yöneltildiğinden emin olun
- Ekrandaki odak puanını maksimize etmek için lensi çevirin
- Odaklandıktan sonra, lensin etrafına 3-8 damla süper yapıştırıcı veya süper yapıştırıcı jel uygulayın
6. Ağ Yapılandırması
Takım Numarasını Ayarlama (FRC / Networktables için Gerekli)
- Robotunuzu açın ve dizüstü bilgisayarınızı robotunuzun ağına bağlayın
- Limelight Hardware Manager'ı açın, Limelight'ları tarayın ve görünen girişe çift tıklayın
- Alternatif olarak, http://limelight.local:5801 adresine gidin
- "Settings" sekmesine gidin
- Takım numaranızı girin ve "Update Team Number"a basın
Benzersiz Ana Bilgisayar Adı Ayarlama (Yalnızca birden fazla Limelight'lı FRC / Networktables sistemleri için Gerekli)
- Birden fazla Limelight kullanıyorsanız, her Limelight'ın benzersiz bir ana bilgisayar adı olmalıdır
- Ayarlar sekmesinde, bir ana bilgisayar adı yapılandırın ve "set hostname" düğmesine tıklayın
Statik IP Ayarlama (Önerilen, gerekli değil)
- "IP Assignment"ı "Static" olarak değiştirin
- IP adresini "10.TE.AM.11" olarak ayarlayın
- Takım 916, 10.9.16.xx kullanır
- Takım 9106, 10.91.6.xx kullanır
- Takım 9016, 10.90.16.xx kullanır
- Netmask'ı "255.255.255.0" olarak ayarlayın
- Gateway'i "10.TE.AM.1" olarak ayarlayın
- "Update"e tıklayın
- Robotunuzu yeniden başlatın
- Yapılandırma panelinize 10.TE.AM.11:5801 adresinden ve kamera akışına 10.TE.AM.11:5800 adresinden erişin
- Birden fazla Limelight kullanıyorsanız, her Limelight'a benzersiz bir statik IP adresi verin
S. Neden statik IP adresi kullanımını öneriyoruz?
C. Limelight'ın açılış süresinden birkaç saniye kısaltır. İkinci olarak, takımlar tarihsel olarak gerçek FRC sahalarında ve etkinlik radyo yazılımlarında DHCP ataması ve mDNS yanıtlayıcıları ile sorunlar yaşamıştır.
Robo-rio ve sürücü istasyonunuzda da statik IP adresleri ayarlamanızı öneririz. Tüm bu cihazlarda kullanılacak ağ ayarları bu web sayfasının alt yarısında bulunabilir
7. Sorun Giderme
Durum Işığı Göstergeleri
- Yeşil Işık: Yavaş yanıp söner (hedef yok), hızlı yanıp söner (hedefler algılandı)
- Sarı Işık: Yanıp söner (statik IP yok), sabit (statik IP atanmış)
limelight.local:5801 çalışmıyorsa
- Bonjour'un yüklü olup olmadığını kontrol edin (Windows: program ekle/kaldır)
- İki Bonjour öğeniz varsa "bonjour print services"i kaldırın
- Eksikse İndirmeler sayfasından Bonjour'u yükleyin
IP adresini sıfırlama
- Limelight'ınız açıldıktan sonra yapılandırma düğmesini 10 saniye basılı tutun
- Ağ yapılandırması bir sonraki açılışta dinamik adreslemeye sıfırlanacaktır