Início Rápido do Limelight 3G

Especificações de Hardware
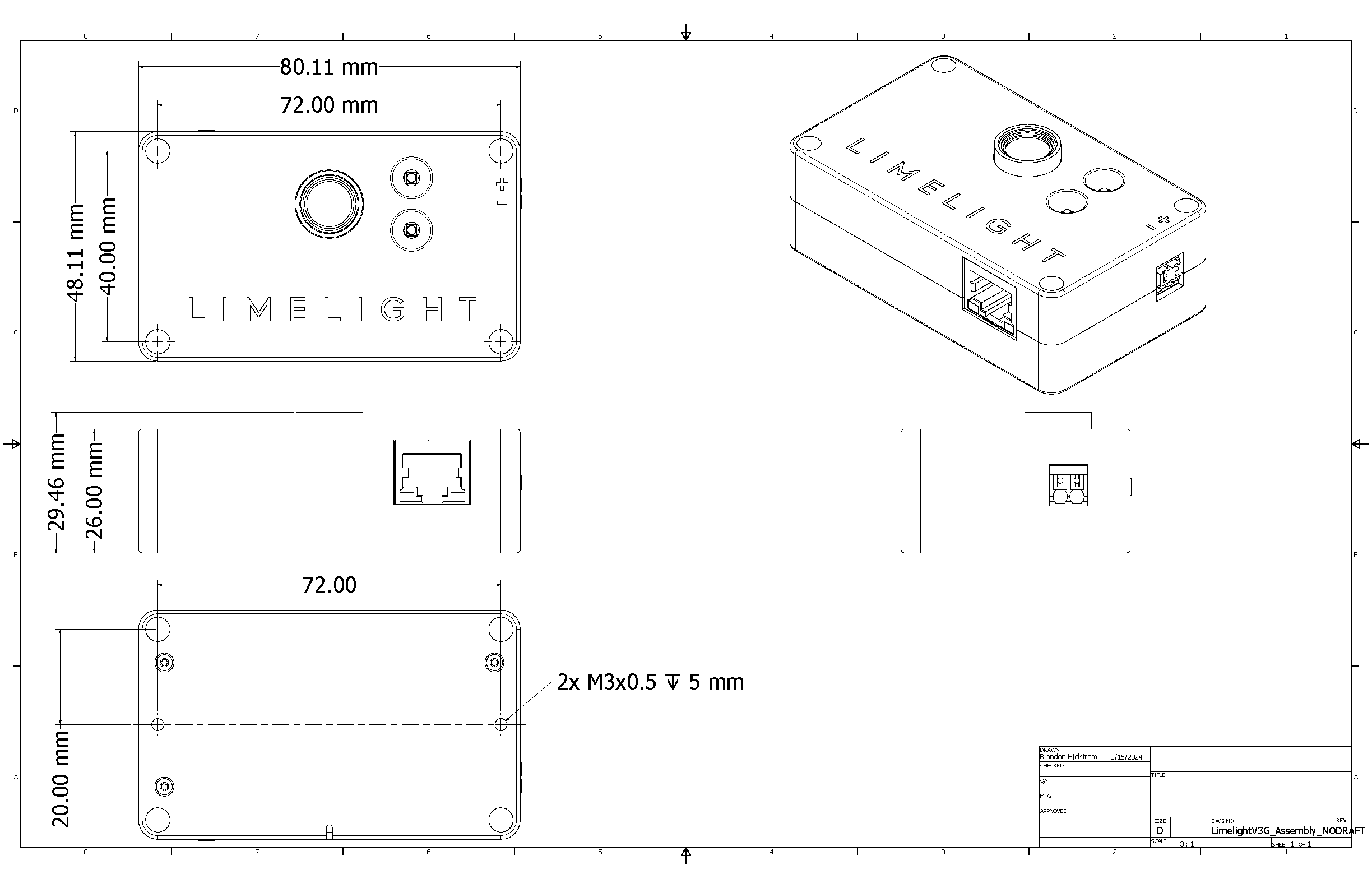
- Dimensões: 3.154in x 1.894in (80.11mm x 48.11mm)
- Espessura: 1.160in (29.46mm)
- Massa: 0.24 lb
- Montagem com Furos Passantes #10 / M4
- Furos de montagem roscados M3
- Entrada de Energia: 4.1V-16V (4.1V-24V para variante com botão vermelho, 30V máximo absoluto)
- Consumo máximo de energia de 4W
- Sensor: OV9281 Global Shutter Monocromático (1280x800 @ 120FPS, 640x480 @ 240FPS)
- Lente M12 Substituível
- 82 graus FOV Horizontal, 56.2 graus FOV Vertical
- Gabinete Todo em Alumínio com Anodização Preta
- Porta RJ45 Gigabit Ethernet
- Porta USB C para Imagem e Conectividade
Capacidades de Software (Limelight OS)
- Visão de alto desempenho plug-and-play. Nenhuma experiência necessária.
- Interface de usuário baseada em navegador auto-hospedada para configuração de pipeline de visão
- Suporte a REST/HTTP, Websocket, NetworkTables, ModbusTCP e ROS
- Conectividade USB com suporte a driver USB-Ethernet plug-and-play no Windows, Linux, MacOS e Android
- Suporte a rede neural de detecção de objetos MobileNetSSD 20FPS com arrastar e soltar
- Exposição fixa configurável, ganho do sensor, resolução e taxa de quadros.
- Configure 10 Pipelines de Visão com Troca Rápida:
- Pipelines Python Personalizados com OpenCV 4.10, numpy, etc.
- Rastreamento de AprilTag 2D, 3D e Localização de Robô
- Localização 3D Completa (GPS do Robô) com MegaTag1
- Localização 3D Completa de Alta Precisão (GPS do Robô) com Fusão de IMU Externo com MegaTag2
- Desempenho de até 50fps em 640x480 com Downscaling do detector
- Visualizador 3D Completo na interface web
- Pipelines de Color Blob 120-240FPS
- Pipelines de Detecção Neural de Objetos
- Pipelines de Classificação Neural de Imagens
- Pipelines de Rastreamento de Código de Barras
- Pipeline de Foco de Lente
- Pipeline de visualização para streaming de baixa latência
- Interface de Calibração de Intrínsecos Charuco integrada para pipelines de visão de alta precisão.
- Visualização de Calibração de Intrínsecos
- Streaming MJPEG de baixa latência integrado. Orientação de stream configurável
1. Montando o Limelight 3G
Montagem com Furos Passantes
- Use parafusos #10-32 ou #10-24 de 1 1/4" com porcas nylock
- Alternativamente, use parafusos M4 de 38mm com porcas nylock
- Use arruelas plásticas para preservar a anodização
Montagem Roscada (Parte Traseira)
- 2x pontos de montagem roscados M3
- Considere aplicação leve de trava-rosca (Vibratite ou Loctite azul)
2. Fiação do Limelight 3G
Energia
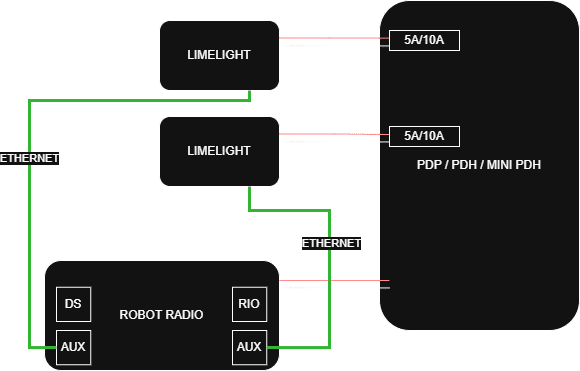
- Passe dois fios 18-20AWG do seu Limelight para um slot no seu PDP/PDH
- Adicione um disjuntor de 5A no mesmo slot
- Importante: Um VRM dedicado é fortemente recomendado para LL3G pré-2025 (botão branco) para proteção contra picos de carga devido a eventos de frenagem regenerativa do swerve drive + desconexão da bateria
- (Não Obrigatório) Use terminais Weidmuller para melhores resultados (Na imagem, fio 20AWG com terminais Weidmuller 20AWG laranja)
- Terminais:
- Ferramentas de crimpagem de terminais de baixo custo:

Ethernet
- Passe um cabo ethernet do seu Limelight para o rádio do seu robô
- Use cabos Cat6 trançados com fios flexíveis (idealmente 20AWG)
- Adicione um alívio de tensão ao seu cabo ethernet
Flash USB
- Para entrar no modo de flash, segure o botão de configuração enquanto conecta via USB C
- Durante o flash, é seguro alimentar via USB.
Interface USB-Ethernet
- O Limelight 3G tem funcionalidade USB-Ethernet que permite conectividade plug-and-play com Windows, Linux e MacOS. Você pode usar a interface web e todos os outros recursos via USB.
- O Limelight 3G geralmente se encaixa no orçamento de energia da maioria das portas USB - você pode usar USB-Ethernet com segurança sem energia externa.
- Interface de configuração do Limelight no Windows (USB-Ethernet): http://172.28.0.1:5801
- Interface de configuração do Limelight no Linux (USB-Ethernet): http://172.29.0.1:5801
3. Acessando a Interface Web
Após conectar seu Limelight 3G à sua rede:
- Ligue seu robô e conecte seu laptop à rede do seu robô
- Use um destes métodos para acessar a interface web:
- Método 1: Abra o aplicativo Limelight Hardware Manager, procure por Limelights e clique duas vezes no seu Limelight quando ele aparecer
- Método 2: Abra um navegador web e navegue para
http://limelight.local:5801 - Método 3: Abra um navegador web e navegue para o endereço IP estático do seu Limelight com a porta 5801 (se configurado)
- Método 4 (USB): Conecte via USB-C e navegue para:
- Windows: http://172.28.0.1:5801
- Linux/Mac: http://172.29.0.1:5801
Uma vez conectado, você terá acesso a:
- Aba Configurações - Configure número da equipe, hostname e outras configurações do sistema
- Abas de Pipeline de Visão - Configure e ajuste seus pipelines de processamento de visão
- Aba Câmera & Mira - Ajuste configurações da câmera e parâmetros da mira
- Aba Visualização 3D - Visualize detecção de AprilTag e localização em tempo real
Toda a configuração é feita através desta interface web. As alterações são salvas automaticamente no seu Limelight.
4. Atualizando o LimelightOS
cuidado
Faça backup dos seus pipelines e scripts antes de atualizar - eles serão apagados durante este processo!
- Desligue seu Limelight
- Baixe os mais recentes drivers USB, imagem do Limelight OS e ferramenta Balena Flash
- Segure o botão de configuração no seu Limelight e, enquanto segura, conecte um cabo USB->USB-C do seu laptop ao seu Limelight (seu Limelight ligará automaticamente)
- Execute o "Balena Etcher" como administrador
- Pode levar até 20 segundos para sua máquina reconhecer a câmera
- Selecione a imagem .zip mais recente na sua pasta de downloads
- Selecione um dispositivo "Compute Module" no menu "Drives"
- Clique em "Flash"
- Quando o flash estiver completo, remova o cabo USB do seu Limelight
5. Focando seu Limelight 3G
- Conecte seu LL3G ao seu laptop via USB (certifique-se de que está montado no seu robô ou em uma superfície)
- Conecte-se à interface web conforme descrito na seção 3
- Clique em "Ignore NT pipeline index" para habilitar a troca de pipeline e mude para o pipeline 9
- Defina o tipo de pipeline como "focus"
- Vá para a aba de configuração e aumente a qualidade do stream para o máximo
- Certifique-se de que a câmera está apontada para algo com muitos detalhes e contraste, como uma placa ARUCO, uma cena detalhada ou uma estrela de Siemens
- Gire a lente para maximizar a pontuação de foco na tela
- Uma vez focado, aplique 3-8 pontos de super cola ou gel de super cola ao redor da lente
6. Configuração de Rede
Configurando o Número da Equipe (Obrigatório para FRC / Networktables)
- Ligue seu robô e conecte seu laptop à rede do seu robô
- Abra o Limelight Hardware Manager, procure por Limelights e clique duas vezes na entrada que aparecer
- Alternativamente, navegue para http://limelight.local:5801
- Vá para a aba "Settings"
- Digite o número da sua equipe e pressione "Update Team Number"
Configurando um Hostname Único (Apenas Obrigatório para sistemas FRC / Networktables com múltiplos Limelights)
- Se você está usando múltiplos Limelights, cada Limelight deve ter um hostname único
- Na aba de configurações, configure um hostname e clique no botão "set hostname"
Configurando IP Estático (Recomendado, não obrigatório)
- Mude "IP Assignment" para "Static"
- Defina o endereço IP como "10.TE.AM.11"
- Equipe 916 usa 10.9.16.xx
- Equipe 9106 usa 10.91.6.xx
- Equipe 9016 usa 10.90.16.xx
- Defina Netmask como "255.255.255.0"
- Defina Gateway como "10.TE.AM.1"
- Clique em "Update"
- Reinicie seu robô
- Acesse seu painel de configuração em 10.TE.AM.11:5801 e stream da câmera em 10.TE.AM.11:5800
- Se você está usando múltiplos Limelights, dê a cada Limelight um endereço IP estático único
P. Por que recomendamos o uso de um endereço IP estático?
R. Isso reduz vários segundos do tempo de inicialização do Limelight. Segundo, as equipes historicamente tiveram problemas com atribuição DHCP e respondedores mDNS em campos FRC reais e com firmware de rádio de eventos.
Recomendamos configurar endereços IP estáticos no seu robo-rio e driverstation também. As configurações de rede para usar em todos esses dispositivos podem ser encontradas na metade inferior de esta página web
7. Solução de Problemas
Indicadores de Luz de Status
- Luz Verde: Pisca lentamente (sem alvos), pisca rapidamente (alvos detectados)
- Luz Amarela: Pisca (sem IP estático), sólida (IP estático atribuído)
Se limelight.local:5801 não funcionar
- Verifique se você tem o Bonjour instalado (Windows: adicionar/remover programas)
- Desinstale "bonjour print services" se você tiver dois itens Bonjour
- Instale o Bonjour da página de Downloads se estiver faltando
Redefinir endereço IP
- Segure o botão de configuração por 10 segundos após seu Limelight ter inicializado
- A configuração de rede será redefinida para endereçamento dinâmico na próxima inicialização