התקנת FTC

Limelight 3A ל-FTC תוכנן כדי להפוך את עיבוד התמונה לקל מתמיד. הנה סקירה מהירה של התהליך:
- חבר את ה-Limelight שלך למחשב הנייד עם כבל USB
- הגדר עד 10 צינורות ראייה עם ממשק האינטרנט המובנה של Limelight.
- לכל צינור יש "סוג". לדוגמה, תוכל להגדיר את צינור 0 להיות צינור "AprilTag"
- תוכל לכתוב צינורות משלך על ידי הגדרת סוג הצינור ל-"Python Snapscript"
- סוגי הצינורות המובנים יכולים לעקוב אחר חלקי משחק צבעוניים, להריץ רשתות נוירונים, ולמקם את הרובוט שלך בתלת-ממד בהתבסס על מפת שדה שהועלתה. כל 3A מגיע עם מפת שדה Into The Deep מובנית
- לאחר שבדקת את הצינורות שלך במחשב הנייד, תוכל לחבר את ה-Limelight שלך ליציאת USB 3.0 של Control Hub.
- בדוק את דוגמאות התכנות של FTC כדי לקבל נתוני תוצאות מה-LL לקוד הרובוט שלך.
הנה מדריך התחלה מפורט יו�תר:
הרכבה ו-CAD
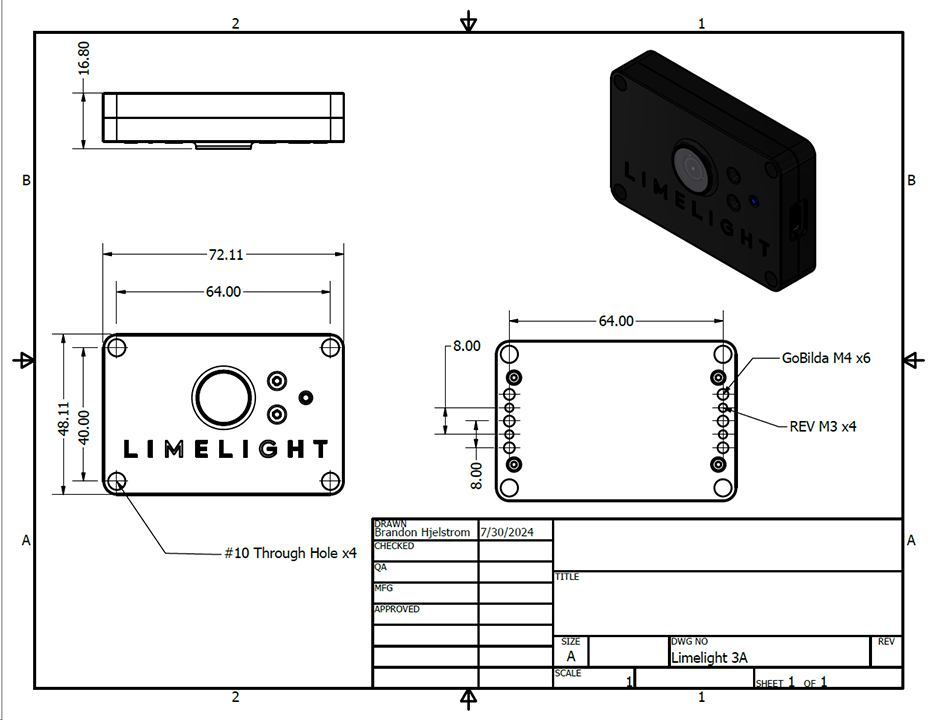
- השתמש בלפחות 2 ברגי M3 או M4 כדי להרכיב את ה-LL3A שלך על תעלת Rev או GoBilda באמצעות חורי ההברגה.
- תוכל גם להשתמש בסרט VHB או אזיקונים כדי לקבע את ה-Limelight שלך
- CAD: עבור לדף ההורדות.
עדכון LimelightOS
info
Limelights מגיעים עם תמונה מותקנת מראש. סביר להניח שתוכל לדלג על שלב זה בינתיים.
הוראות עדכון (Windows)
warning
שמור את הצינורות שלך לפני עדכון LimelightOS. הם יימחקו במהלך העדכון.
- הורד את מנהלי ההתקן העדכניים של USB, תמונת Limelight OS, וכלי Balena Flash מדף ההורדות.
- החזק את כפתור התצורה הכחול על ה-Limelight שלך
- תוך כדי החזקה, חבר כבל USB->USB-C מהמחשב הנייד שלך ל-Limelight. ה-Limelight יידלק אוטומטית.
- לאחר שחיברת את ה-LL למחשב הנייד שלך, תוכל לשחרר את כפתור התצורה הכחול
- ה-Limelight שלך כעת במצב flash, ונוריות ה-LED שלו לא יהבהבו.
- הפעל את "Balena Etcher" כמנהל מערכת.
- ייתכן שייקח עד 20 שניות למכשיר שלך לזהות את המצלמה.
- בחר את קובץ ה-.zip העדכני ביותר בתיקיית ההורדות שלך
- בחר מכשיר "Compute Module" בתפריט "Drives"
- לחץ על "Flash"
- לאחר שהעדכון הושלם, הסר את כבל ה-USB מה-Limelight שלך.
הוראות עדכון (מתקדם) (macOS ו-Linux)
warning
שמור את הצינורות שלך לפני עדכון LimelightOS. הם יימחקו במהלך העדכון.
note
אנחנו עובדים על פישוט משמעותי של תהליך העדכון ב-macOS ו-Linux
- הורד את תמונת Limelight OS וכלי Balena Flash מדף ההורדות.
- בנה את מנהל ההתקן של USB Boot בעצמך:
brew install libusb
brew install pkg-config
git clone --recurse-submodules --shallow-submodules --depth=1 https://github.com/raspberrypi/usbboot
cd usbboot
make
cd mass-storage-gadget64
sudo ../rpiboot -d .
# כל עוד rpiboot רץ, המצלמה שלך תזוהה כראוי ב-macOS ו-Linux
# אתה צריך להריץ את rpiboot בכל פעם שאתה רוצה לבצע flash.
- החזק את כפתור התצורה הכחול על ה-Limelight שלך
- תוך כדי החזקה, חבר כבל USB->USB-C מהמחשב הנייד שלך ל-Limelight. ה-Limelight יידלק אוטומטית.
- לאחר שחיברת את ה-LL למחשב הנייד שלך, תוכל לשחרר את כפתור התצורה הכחול
- ה-Limelight שלך כעת במצב flash, ונוריות ה-LED שלו לא יהבהבו.
- הפעל את "Balena Etcher".
- ייתכן שייקח עד 20 שניות למכשיר שלך לזהות את המצלמה.
- בחר את קובץ ה-.zip העדכני ביותר בתיקיית ההורדות שלך
- בחר מכשיר "Compute Module" בתפריט "Drives"
- לחץ על "Flash"
- לאחר שהעדכון הושלם, הסר את כבל ה-USB מה-Limelight שלך.
חיווט הרובוט
כשאתה מוכן להשתמש ב-LL על הרובוט שלך, חבר כבל USBC ל-USBA מה-LL3A שלך ליציאת USB 3.0 של Control Hub. Limelight 3A אינו תומך ב-Google Coral. אתה עדיין יכול להשתמש בצינורות זיהוי וסיווג נוירונים על ידי הגדרת מנוע הריצה של הרשת הנוירונית ל-"cpu"
הגדרת Control Hub
- עדכן את מערכת ההפעלה של Control Hub, אפליקציית DriverStation, אפליקציית RobotController, ו-SDK לגרסאות העדכניות ביותר שלהם.
- חבר את ה-Limelight ל-ControlHub והמתן עד שנורית המצב הירוקה של ה-Limelight תתחיל להבהב
- חבר את ה-ControlHub לרשת ה-WiFi של הרובוט שלך
- באפליקציית FTC DriverStation, לחץ על "Configure Robot"
- אם אין לך תצורה פעילה, ייתכן שתצטרך ליצור אחת חדשה.
- לחץ על כפתור ה"scan"
- אתה אמור לראות "Ethernet Device" מופיע.
- תוכל לערוך את שם המכשיר ל-"limelight" לבהירות.
- כעת תוכל לאתחל אובייקט Limelight3A בקוד שלך באמצעות מפת החומרה.