FTC Kurulumu

FTC için Limelight 3A, görüntü işlemeyi her zamankinden daha kolay hale getirmek için tasarlanmıştır. İşte sürecin hızlı bir genel bakışı:
- Limelight'ınızı bir USB kablosu ile dizüstü bilgisayarınıza bağlayın
- Limelight'ın yerleşik web arayüzü ile 10'a kadar görüntü işleme hattı yapılandırın.
- Her Pipeline'ın bir "türü" vardır. Örneğin, pipeline 0'ı bir "AprilTag" pipeline'ı olarak yapılandırabilirsiniz
- Pipeline türünü "Python Snapscript" olarak ayarlayarak kendi pipeline'larınızı yazabilirsiniz
- Yerleşik pipeline türleri renkli oyun parçalarını takip edebilir, sinir ağlarını çalıştırabilir ve yüklenmiş bir saha haritasına göre robotunuzu 3B olarak konumlandırabilir. Her 3A, yerleşik Into The Deep saha haritası ile birlikte gelir
- Dizüstü bilgisayarınızda pipeline'larınızı test ettikten sonra, Limelight'ınızı Control Hub'ınızın USB 3.0 Portuna takabilirsiniz.
- LL'den robot kodunuza sonuç verilerini almak için FTC programlama örneklerine göz atın.
İşte daha detaylı bir başlangıç kılavuzu:
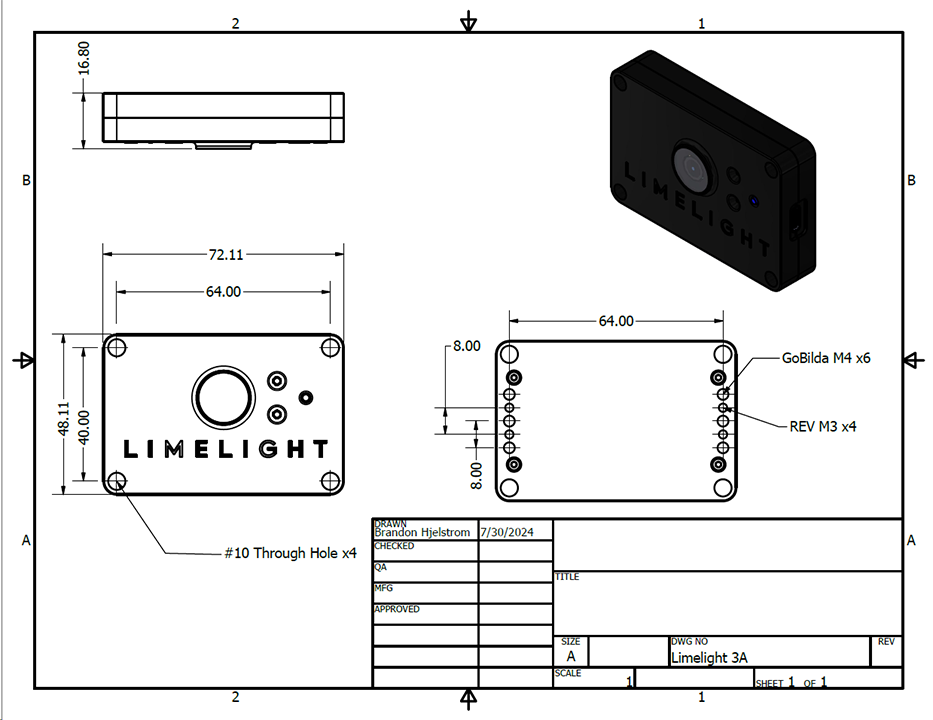
Montaj ve CAD
- LL3A'nızı Rev veya GoBilda Kanalına monte etmek için dişli montaj deliklerini kullanarak en az 2 M3 veya M4 vida kullanın.
- Limelight'ınızı sabitlemek için VHB bant veya kablo bağı da kullanabilirsiniz
- CAD: İndirmeler Sayfası'na gidin.
LimelightOS'u Güncelleme
Limelightlar önceden yüklenmiş bir imajla gelir. Şimdilik bu adımı atlayabilirsiniz.
Güncelleme Talimatları (Windows)
LimelightOS'u güncellemeden önce pipeline'larınızı kaydedin. Güncelleme sırasında silineceklerdir.
- En son USB sürücülerini, Limelight OS imajını ve Balena Flash aracını İndirmeler Sayfası'ndan indirin.
- Limelight'ınızdaki mavi yapılandırma düğmesini basılı tutun
- Basılı tutarken, dizüstü bilgisayarınızdan limelight'ınıza bir USB->USB-C kablosu bağlayın. Limelight'ınız otomatik olarak açılacaktır.
- LL'nizi dizüstü bilgisayarınıza taktıktan sonra mavi yapılandırma düğmesini bırakabilirsiniz
- Limelight'ınız artık flash modundadır ve LED'leri yanıp sönmeyecektir.
- "Balena Etcher"ı yönetici olarak çalıştırın.
- Makinenizin kamerayı tanıması 20 saniye kadar sürebilir.
- İndirmeler klasörünüzdeki en son .zip imajını seçin
- "Sürücüler" menüsünden bir "Compute Module" cihazı seçin
- "Flash" düğmesine tıklayın
- Flash işlemi tamamlandığında, usb kablosunu limelight'ınızdan çıkarın.
Güncelleme Talimatları (Gelişmiş) (macOS ve Linux)
LimelightOS'u güncellemeden önce pipeline'larınızı kaydedin. Güncelleme sırasında silineceklerdir.
macOS ve Linux'ta güncelleme sürecini önemli ölçüde basitleştirmek için çalışıyoruz
- Limelight OS imajını ve Balena Flash aracını İndirmeler Sayfası'ndan indirin.
- USB Boot sürücüsünü kendiniz derleyin:
brew install libusb
brew install pkg-config
git clone --recurse-submodules --shallow-submodules --depth=1 https://github.com/raspberrypi/usbboot
cd usbboot
make
cd mass-storage-gadget64
sudo ../rpiboot -d .
# rpiboot çalıştığı sürece, kameranız macOS ve Linux'ta düzgün şekilde tanınacaktır
# Her flash yapmak istediğinizde rpiboot'u çalıştırmanız gerekir.
- Limelight'ınızdaki mavi yapılandırma düğmesini basılı tutun
- Basılı tutarken, dizüstü bilgisayarınızdan limelight'ınıza bir USB->USB-C kablosu bağlayın. Limelight'ınız otomatik olarak açılacaktır.
- LL'nizi dizüstü bilgisayarınıza taktıktan sonra mavi yapılandırma düğmesini bırakabilirsiniz
- Limelight'ınız artık flash modundadır ve LED'leri yanıp sönmeyecektir.
- "Balena Etcher"ı çalıştırın.
- Makinenizin kamerayı tanıması 20 saniye kadar sürebilir.
- İndirmeler klasörünüzdeki en son .zip imajını seçin
- "Sürücüler" menüsünden bir "Compute Module" cihazı seçin
- "Flash" düğmesine tıklayın
- Flash işlemi tamamlandığında, usb kablosunu limelight'ınızdan çıkarın.
Robot Kablo Bağlantısı
LL'nizi robotunuzda kullanmaya hazır olduğunuzda, LL3A'nızdan Control Hub'ınızın USB 3.0 Portuna bir USBC - USBA kablosu bağlayın. Limelight 3A, Google Coral'ı desteklemez. Sinir ağı çalışma zamanı motorunu "cpu" olarak ayarlayarak yine de sinir algılama ve sınıflandırma pipeline'larını kullanabilirsiniz.
Control Hub Kurulumu
- Control Hub OS'unuzu, DriverStation Uygulamanızı, RobotController Uygulamanızı ve SDK'yı en son sürümlerine güncelleyin.
- Limelight'ınızı Control Hub'a bağlayın ve Limelight'ın yeşil durum ışığının yanıp sönmeye başlamasını bekleyin
- Control Hub'ınızı robotunuzun WiFi ağına bağlayın
- FTC DriverStation Uygulamasında "Configure Robot" (Robot Yapılandır) düğmesine tıklayın
- Aktif bir yapılandırmanız yoksa, yeni bir tane oluşturmanız gerekebilir.
- "Tara" düğmesine tıklayın
- Bir "Ethernet Device" (Ethernet Cihazı) görünmelidir.
- Netlik için bu cihazın adını "limelight" olarak düzenleyebilirsiniz.
- Artık donanım haritasını kullanarak kodunuzda bir Limelight3A nesnesi başlatabilirsiniz.