Configuración de FTC

Limelight 3A para FTC está diseñado para hacer el procesamiento de visión más fácil que nunca. Aquí hay una descripción general del proceso:
- Conecta tu Limelight a tu portátil con un cable USB
- Configura hasta 10 pipelines de visión con la interfaz web incorporada de Limelight.
- Cada Pipeline tiene un "tipo". Por ejemplo, puedes configurar el pipeline 0 para que sea un pipeline "AprilTag"
- Puedes escribir tus propios pipelines configurando el tipo de pipeline a "Python Snapscript"
- Los tipos de pipeline incorporados pueden rastrear piezas de juego de colores, ejecutar redes neuronales y localizar tu robot en 3D basándose en un mapa de campo cargado. Cada 3A viene con un mapa de campo Into The Deep incorporado
- Una vez que hayas probado tus pipelines en tu portátil, puedes conectar tu Limelight al puerto USB 3.0 de tu Control Hub.
- Revisa los ejemplos de programación de FTC para obtener datos de resultados de tu LL en tu código de robot.
Aquí hay una guía de inicio más detallada:
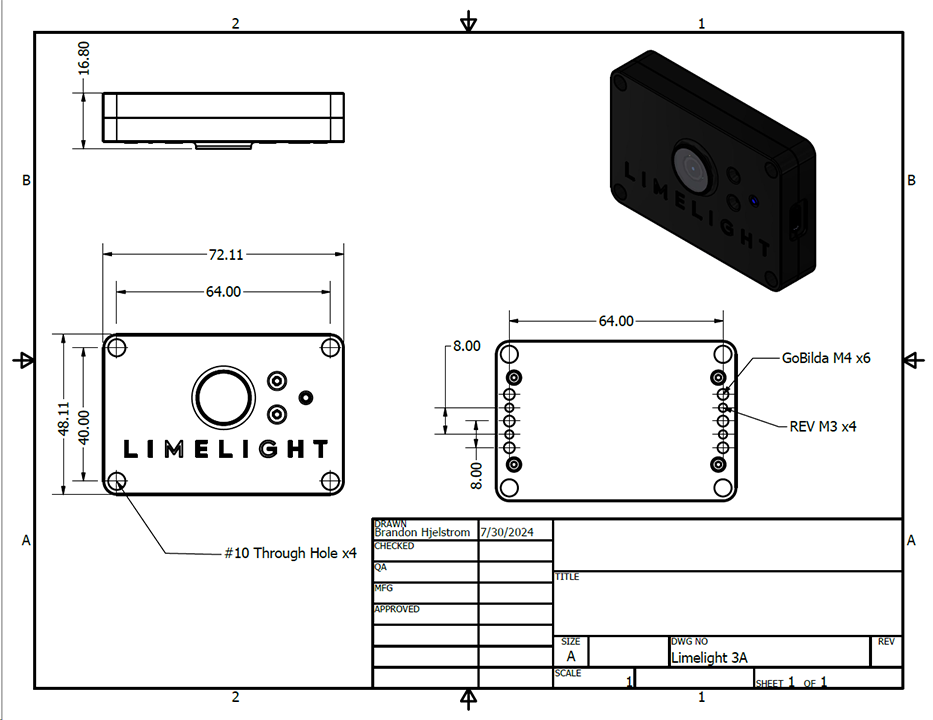
Montaje y CAD
- Usa al menos 2 tornillos M3 o M4 para montar tu LL3A en canales Rev o GoBilda usando los agujeros roscados.
- También puedes usar cinta VHB o bridas para sujetar tu Limelight
- CAD: Ve a la Página de Descargas.
Actualizando LimelightOS
Los Limelights vienen con una imagen preinstalada. Probablemente puedas omitir este paso por ahora.
Instrucciones de actualización (Windows)
Guarda tus pipelines antes de actualizar LimelightOS. Se eliminarán durante la actualización.
- Descarga los últimos controladores USB, la imagen de Limelight OS y la herramienta Balena Flash desde la Página de Descargas.
- Mantén presionado el botón azul de configuración en tu Limelight
- Mientras lo mantienes presionado, conecta un cable USB->USB-C desde tu portátil a tu Limelight. Tu Limelight se encenderá automáticamente.
- Después de conectar tu LL a tu portátil, puedes soltar el botón azul de configuración
- Tu Limelight ahora está en modo flash, y sus LEDs no parpadearán.
- Ejecuta "Balena Etcher" como administrador.
- Puede tomar hasta 20 segundos para que tu máquina reconozca la cámara.
- Selecciona la última imagen .zip en tu carpeta de descargas
- Selecciona un dispositivo "Compute Module" en el menú "Drives"
- Haz clic en "Flash"
- Una vez que la actualización esté completa, retira el cable USB de tu Limelight.
Instrucciones de actualización (Avanzado) (macOS y Linux)
Guarda tus pipelines antes de actualizar LimelightOS. Se eliminarán durante la actualización.
Estamos trabajando para simplificar dramáticamente el proceso de actualización en macOS y Linux
- Descarga la imagen de Limelight OS y la herramienta Balena Flash desde la Página de Descargas.
- Compila el controlador USB Boot tú mismo:
brew install libusb
brew install pkg-config
git clone --recurse-submodules --shallow-submodules --depth=1 https://github.com/raspberrypi/usbboot
cd usbboot
make
cd mass-storage-gadget64
sudo ../rpiboot -d .
# Mientras rpiboot esté ejecutándose, tu cámara se enumerará correctamente en macOS y Linux
# Necesitas ejecutar rpiboot cada vez que quieras actualizar.
- Mantén presionado el botón azul de configuración en tu Limelight
- Mientras lo mantienes presionado, conecta un cable USB->USB-C desde tu portátil a tu Limelight. Tu Limelight se encenderá automáticamente.
- Después de conectar tu LL a tu portátil, puedes soltar el botón azul de configuración
- Tu Limelight ahora está en modo flash, y sus LEDs no parpadearán.
- Ejecuta "Balena Etcher".
- Puede tomar hasta 20 segundos para que tu máquina reconozca la cámara.
- Selecciona la última imagen .zip en tu carpeta de descargas
- Selecciona un dispositivo "Compute Module" en el menú "Drives"
- Haz clic en "Flash"
- Una vez que la actualización esté completa, retira el cable USB de tu Limelight.
Cableado del Robot
Cuando estés listo para usar tu LL en tu robot, conecta un cable USBC a USBA desde tu LL3A al puerto USB 3.0 de tu Control Hub. Limelight 3A no es compatible con Google Coral. Aún puedes usar pipelines de detección y clasificación neural configurando el motor de tiempo de ejecución de red neural a "cpu"
Configuración del Control Hub
- Actualiza tu Control Hub OS, la aplicación DriverStation, la aplicación RobotController y el SDK a sus últimas versiones.
- Conecta tu Limelight a tu Control Hub y espera a que la luz verde de estado del Limelight comience a parpadear
- Conecta tu Control Hub a la red WiFi de tu robot
- En la aplicación FTC DriverStation, haz clic en "Configure Robot"
- Si no tienes una configuración activa, es posible que necesites crear una nueva.
- Haz clic en el botón "scan"
- Deberías ver aparecer un "Ethernet Device"
- Puedes editar el nombre de este dispositivo a "limelight" para mayor claridad.
- Ahora puedes inicializar un objeto Limelight3A en tu código usando el mapa de hardware.