Início Rápido do Limelight 2/2+

Especificações de Hardware
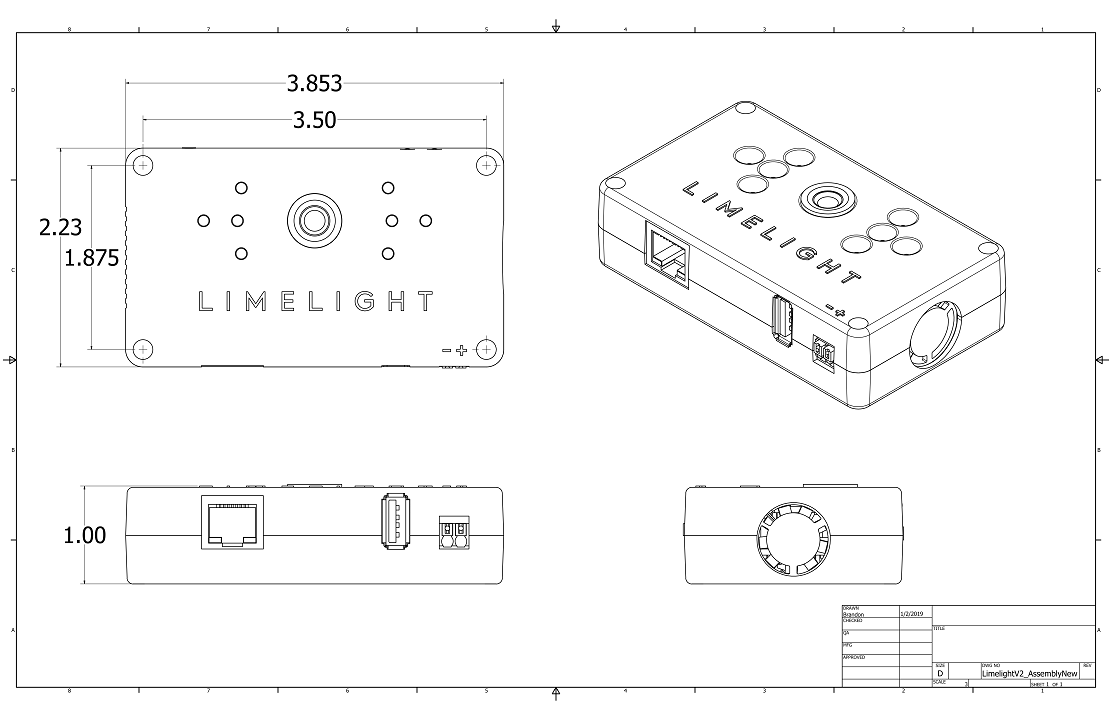
- Dimensões: 3.853in x 2.230in (97.87mm x 56.64mm)
- Espessura: 1.000in (25.40mm)
- Massa: 0.17 lb
- Montagem com Furos Passantes #10 / M4
- Entrada de Energia: 4.1V-16V
- Limelight 2: consumo máximo de energia de 13W
- Limelight 2+: consumo máximo de energia de 7W (redução de 40%)
- Iluminação LED:
- Limelight 2: 450 lumens, iluminação verde
- Limelight 2+: 500 lumens, LEDs com brilho constante em toda a faixa de temperatura
- Sensor: OV5647 Color Rolling Shutter (320x240 @ 90FPS)
- Lente M12 Substituível
- 62.5° FOV Horizontal, 48.9° FOV Vertical
- Gabinete de Policarbonato Preto Resistente a Impactos
- Porta Ethernet RJ45 10/100
- Porta USB-A Host (USB 2.0)
- Luzes de Status: Verde (detecção de alvo), Amarela (status da rede)
- Suporte ao Acelerador de Rede Neural Google Coral USB
Capacidades de Software (Limelight OS)
- Visão de alto desempenho plug-and-play. Nenhuma experiência necessária.
- Interface de usuário baseada em navegador auto-hospedada para configuração de pipeline de visão
- Suporte a REST/HTTP, Websocket, NetworkTables, ModbusTCP e ROS
- Exposição fixa configurável, ganho do sensor, resolução e taxa de quadros.
- Configure 10 Pipelines de Visão Intercambiáveis:
- Pipelines Python Personalizados com OpenCV 4.10, numpy, etc.
- Rastreamento AprilTag 2D, 3D e Localização de Robô
- Localização 3D Completa (GPS do Robô) com MegaTag1
- Localização 3D Completa de Alta Precisão (GPS do Robô) com Fusão de IMU Externo com MegaTag2
- Visualizador 3D Completo na interface web
- Pipelines de Blob de Cor a 90FPS
- Pipelines de Detecção de Objetos Neural
- Pipelines de Classificação de Imagem Neural
- Pipelines de Rastreamento de Código de Barras
- Pipeline Viewfinder para streaming de baixa latência
- Streaming MJPEG de baixa latência integrado. Orientação de stream configurável
1. Montando o Limelight 2/2+
Montagem com Furos Passantes
- Use parafusos #10-32 ou #10-24 de 1 1/4" com porcas nylock
- Alternativamente, use parafusos M4 de 38mm com porcas nylock
- Use arruelas plásticas para preservar o acabamento do gabinete
2. Fiação do Limelight 2/2+
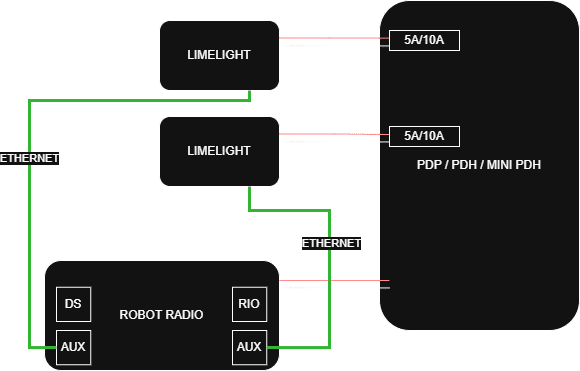
Energia
- Passe dois fios 18-20AWG do seu Limelight para um slot no seu PDP/PDH
- Adicione um disjuntor de 5A no mesmo slot
- (Não Obrigatório) Use terminais Weidmuller para melhores resultados (Na imagem, fio 20AWG com terminais Weidmuller 20AWG laranja)
- Terminais:
- Ferramentas de crimpagem de terminais de baixo custo:

Ethernet
- Passe um cabo ethernet do seu Limelight para o rádio do seu robô
- Use cabos Cat6 trançados com fios flexíveis (idealmente 20AWG)
- Adicione um alívio de tensão ao seu cabo ethernet
3. Acessando a Interface Web
Após conectar seu Limelight 2/2+ à sua rede:
- Ligue seu robô e conecte seu laptop à rede do robô
- Use um destes métodos para acessar a interface web:
- Método 1: Abra o aplicativo Limelight Hardware Manager, procure por Limelights e clique duas vezes no seu Limelight quando ele aparecer
- Método 2: Abra um navegador web e navegue para
http://limelight.local:5801 - Método 3: Abra um navegador web e navegue para o endere�ço IP estático do seu Limelight com a porta 5801 (se configurado)
Uma vez conectado, você terá acesso a:
- Aba Configurações - Configure número da equipe, hostname e outras configurações do sistema
- Abas de Pipeline de Visão - Configure e ajuste seus pipelines de processamento de visão
- Aba Câmera & Mira - Ajuste configurações da câmera e parâmetros da mira
Toda a configuração é feita através desta interface web. As alterações são salvas automaticamente no seu Limelight.
4. Atualizando o LimelightOS
Faça backup dos seus pipelines e scripts antes de atualizar - eles serão apagados durante este processo!
- Desligue seu Limelight
- Baixe os mais recentes drivers USB, imagem do Limelight OS e ferramenta Balena Flash
- Conecte um cabo USB->MicroUSB do seu laptop ao seu Limelight (seu Limelight ligará automaticamente)
- Execute o "Balena Etcher" como administrador
- Pode levar até 20 segundos para sua máquina reconhecer a câmera
- Selecione a imagem .zip mais recente na sua pasta de downloads
- Selecione um dispositivo "Compute Module" no menu "Drives"
- Clique em "Flash"
- Quando a gravação estiver completa, remova o cabo USB do seu Limelight
Conecte o cabo micro-USB apenas durante a gravação da imagem. O Limelight entra em um modo especial de flash enquanto o cabo microUSB está conectado. Você não conseguirá acessar a interface web enquanto o Limelight estiver no modo flash.
5. Configuração de Rede
Configurando o Número da Equipe (Obrigatório para FRC / Networktables)
- Ligue seu robô e conecte seu laptop à rede do robô
- Abra o Limelight Hardware Manager, procure por Limelights e clique duas vezes na entrada que aparecer
- Alternativamente, navegue para http://limelight.local:5801
- Vá para a aba "Settings"
- Digite o número da sua equipe e pressione "Update Team Number"
Configurando um Hostname Único (Obrigatório apenas para sistemas FRC / Networktables com múltiplos Limelights)
- Se você estiver usando múltiplos Limelights, cada Limelight deve ter um hostname único
- Na aba de configurações, configure um hostname e clique no botão "set hostname"
Configurando IP Estático (Recomendado, não obrigatório)
- Mude "IP Assignment" para "Static"
- Configure o endereço IP para "10.TE.AM.11"
- Equipe 916 usa 10.9.16.xx
- Equipe 9106 usa 10.91.6.xx
- Equipe 9016 usa 10.90.16.xx
- Configure Netmask para "255.255.255.0"
- Configure Gateway para "10.TE.AM.1"
- Clique em "Update"
- Reinicie seu robô
- Acesse seu painel de configuração em 10.TE.AM.11:5801 e o stream da câmera em 10.TE.AM.11:5800
- Se você estiver usando múltiplos Limelights, dê a cada Limelight um endereço IP estático único
P. Por que recomendamos o uso de um endereço IP estático?
R. Isso reduz vários segundos do tempo de inicialização do Limelight. Segundo, as equipes historicamente tiveram problemas com atribuição DHCP e respondedores mDNS em campos FRC reais e com firmware de rádio de eventos.
Recomendamos configurar endereços IP estáticos no seu robo-rio e driverstation também. As configurações de rede para usar em todos esses dispositivos podem ser encontradas na metade inferior de esta página web
6. Controlando os LEDs
O Limelight 2/2+ inclui LEDs de iluminação verde integrados. Esses LEDs podem ser controlados de várias maneiras:
Via Interface Web��
- Navegue para a aba Camera & Crosshair na interface web
- Use o dropdown LED Mode para selecionar:
- On - Sempre ligado
- Off - Sempre desligado
- Blink - Piscar os LEDs
- Pipeline - LEDs ligam quando um alvo é detectado
Via NetworkTables ou API
- Configure o valor "ledMode":
- 0: Padrão do pipeline
- 1: Forçar desligado
- 2: Forçar piscar
- 3: Forçar ligado
7. Solução de Problemas
Indicadores de Luz de Status
- Luz Verde: Pisca lentamente (sem alvos), pisca rapidamente (alvos detectados)
- Luz Amarela: Pisca (sem IP estático), sólida (IP estático atribuído)
Padrões de Diagnóstico dos LEDs
- Piscar alternado esquerda/direita ou cima/baixo: O cabo interno da câmera se soltou ou o sensor de imagem está danificado
- Piscar Rápido (todos os LEDs): O botão de reset de rede foi pressionado por pelo menos 10 segundos
- Sequência de Inicialização Repetida: O software está travando, possivelmente devido a danos no hardware
Se limelight.local:5801 não funcionar
- Verifique se você tem o Bonjour instalado (Windows: adicionar/remover programas)
- Desinstale "bonjour print services" se você tiver dois itens Bonjour
- Instale o Bonjour da página de Downloads se estiver faltando
Resetar endereço IP
- Segure o botão de configuração por 10 segundos após seu Limelight ter inicializado
- A configuração de rede será resetada para endereçamento dinâmico na próxima inicialização