ChArUco Kamera Kalibrasyonu
Bu Neden Önemli?
Tam kalibre edilmiş bir kamera, daha doğru 2D ve 3D ölçümler sağlayacaktır. "Servoing" yöntemine dayanmayan herhangi bir görev için kullanışlıdır.
Bununla birlikte, mümkün olduğunca "servoing" yöntemini kullanmanızı öneririz. Hızlı, hassas ve nesne yakalama, hedefleme ve hedeflere hizalama gibi görevler için uygundur. Daha fazla doğruluğa ihtiyacınız olduğunu belirlemediğiniz sürece kalibrasyon konusunda endişelenmeyin. Her LL birimi, çoğu kullanım durumu için oldukça iyi sonuçlar sağlayacak varsayılan bir kalibrasyonla birlikte gelir
"servoing", hedefiniz yapılandırılabilir bir "artı işareti" ile mükemmel şekilde hizalanana kadar robotunuzu döndürme işlemidir. Robotikte görüntü problemlerine yaklaşmanın en kolay ve çoğu durumda en güvenilir yoludur.
Kamera Kalibrasyonu Nedir?
İç parametreler kalibrasyonu, aşağıdaki iki bileşeni belirleme işlemidir:
1. Kamera Matrisi
Genellikle K olarak gösterilen kamera matrisi, lens ve sensörün 3D dünyayı nasıl 2D bir görüntüye dönüştürdüğünü tanımlayan 3x3'lük bir matristir.
[fx 0 cx]
[0 fy cy]
[0 0 1]
cx ve cy, ana nokta / ana piksel koordinatlarıdır. Ana nokta / ana piksel, optik eksen / lens merkezi ile doğrudan hizalanmış pikseldir. Üretim sırasında, kamera lensi neredeyse hiçbir zaman görüntü sensörünün merkeziyle mükemmel şekilde hizalanmaz. Hangi pikselin gerçek "merkez" piksel olduğunu anlamamız çok önemlidir
fx ve fy, piksel cinsinden hesaplanmış odak uzunluklarıdır. fx ve fy, kameranın görüş alanını / yakınlaştırma seviyesini anlamamıza yardımcı olur.
2. Distorsiyon Katsayıları
5 distorsiyon katsayısı hesaplıyoruz:
[k1, k2, p1, p2, k3]
k1, k2, k3, düz çizgilerin eğri görünmesine neden olan radyal distorsiyon katsayılarıdır.
p1, p2, lensin görüntü düzlemine paralel olmaması nedeniyle oluşan teğetsel distorsiyon katsayılarıdır
ChArUco Kalibrasyonu Gerçekleştirme
Limelight ile ChArUco kalibrasyonu, mümkün olduğunca sorunsuz ve hatasız olacak şekilde tasarlanmıştır. Aşağıdaki adımları okuyun ve ardından kameranızı artan doğruluk için nasıl kalibre edeceğinizi öğrenmek için videoyu izleyin.
Yalnızca bir çözünürlükte kalibrasyon yapmanız gerekir (LL3 için 1280x960 ve LL3G için 1280x800 öneriyoruz). İç parametreler, pipeline'ınızın seçilen çözünürlüğüne uyacak şekilde otomatik olarak ölçeklenir ve distorsiyon katsayıları sabit bir en-boy oranı ve FOV verildiğinde çözünürlükten bağımsızdır. Donanım yakınlaştırma pipeline'ları ve 5 megapiksel pipeline'lar, özel kalibrasyonları kullanmayacak tek pipeline'lardır.
Tahtayı Hazırlama
Kameranızı kalibre etmek için herhangi bir dizüstü bilgisayar ekranını kullanabilirsiniz. Ancak maksimum doğruluk için, calib.io'dan bu kaba 800mmx600mm tahtayı satın almanızı öneririz
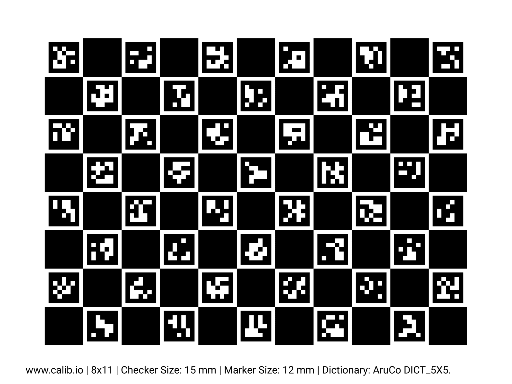
- Bir ChArUco Kalibrasyon Tahtası yazdırın veya büyük bir dizüstü bilgisayar veya bilgisayar ekranında bir tahta görüntüsü kullanın. İndirmeler sayfasından tahtamızı kullanın veya kendinizinkini oluşturun.
- Bir satırdaki toplam siyah kare sayısını ve toplam ArUco işaretçi sayısını toplayarak ızgaranın "genişliğini" bulun (varsayılan Limelight kalibrasyon tahtası için 11).
- Bir sütundaki toplam siyah kare sayısını ve toplam ArUco işaretçi sayısını toplayarak ızgaranın "yüksekliğini" bulun (varsayılan Limelight kalibrasyon tahtası için 8).
- Bir karenin ve bir işaretçinin kenar uzunluklarını milimetre cinsinden ölçerek "kare boyutu" ve "işaretçi boyutu" ölçümlerini doğrulayın.
- Kare boyutu ve işaretçi boyutu ölçümleri kritiktir, bu yüzden kumpas kullanın.
- Sözlük türünü not edin. İndirmeler sayfasındaki varsayılan tahta 5x5_100 sözlüğünü kullanır.
Kalibrasyon Görüntülerini Yakalama
- Tahtanızın mümkün olduğunca düz olduğundan emin olun.
- Tahtanız düz değilse kalibrasyon yapmamalısınız. calib.io'dan özel tahtalar satın alabilir veya yazdırılmış tahtanızı bir panoya sabitleyebilirsiniz.
- Robotunuzu açın ve Limelight web arayüzüne erişin.
- 1280x960 AprilTag pipeline'ı oluşturun.
- "Giriş" kaynak türünü "Kamera"dan "Anlık Görüntü"ye değiştirerek ve "Tüm anlık görüntüleri sil"e tıklayarak kaydedilmiş tüm anlık görüntüleri silin.
- "Giriş" kaynak türünü tekrar "Kamera"ya değiştirin.
- Başlamak için ChArUco tahtasının en az 25 anlık görüntüsünü yakalayın. İşleme aşina olduğunuzda, toplam en az 50 görüntü yakalamak için geri dönmek isteyeceksiniz.
- ChArUco kalibrasyonunun standart dama tahtası kalibrasyonuna göre ana avantajı, tahtanın yalnızca bir kısmı kameraya görünür olsa bile çalışmasıdır. Bu avantajı kullanmak önemlidir.
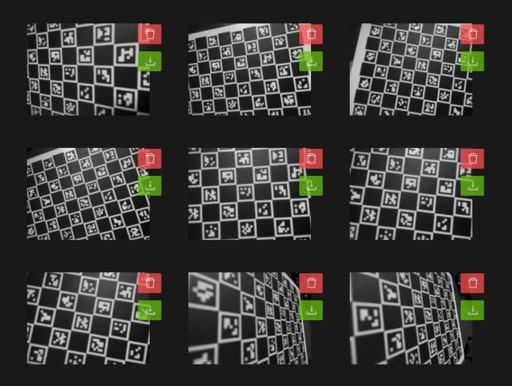
- Görüntüleriniz aşağıdaki özelliklerin iyi bir karışımına sahip olmalıdır:
- Tahtanız görüntünün geniş bölgelerini kaplar.
- Tahtanız görüntünün en az bir kenarını veya köşesini aşar (Bu, görüntülerin kenarlarındaki distorsiyonu hesaplamaya yardımcı olacaktır).
- Tahtanız genellikle perspektif bozulması olacak şekilde konumlandırılır (Tahta görüntü düzlemine paralel olmamalıdır).
- Tahta konumları, perspektifleri ve kapsamında geniş çeşitlilik hedefleyin.
- Görüntülerinizin %50'si önemli kısalma göstermelidir. Bu, yakın işaretçilerin uzaktaki işaretçilerden daha büyük görünmesi etkisidir. Aşağıdaki ekran görüntüsündeki ilk ve son görüntüler kısalmayı göstermektedir
Kalibrasyon
- "Kalibrasyon" sekmesine gidin. Dikey kenar çubuğundaki üçüncü sekmedir.
- "Tahtayı Hazırlama" adımında bulunan beş değeri girin.
- "Anlık Görüntülerle Kalibre Et" düğmesine tıklayın. İşlemin tamamlanması bir veya iki dakika sürebilir.
- Başarı durumunda, "En Son Kalibrasyon Sonucu" kartı en son kalibrasyon sonucunu gösterecektir.
- Düşük yeniden projeksiyon hatası (ideal olarak 1'den az) ile makul bir sonuç için "En Son Kalibrasyon Sonucu" kartını kontrol edin.
- En son kalibrasyon sonucunu indirin ve "özel - dosya" kalibrasyon yuvasına yükleyin.
- Artık üç doldurulmuş kalibrasyon sonucu kartı görmelisiniz.
- Özel kalibrasyon sonucunuzu kullanmak için "tercih edilen kalibrasyonunuzu" "özel - dosya" olarak değiştirin. Tüm pipeline'lar kalibrasyon sonucunuzu kullanacaktır.
- İşleme aşina olduğunuzda daha fazla ekran görüntüsü yakalamayı ve yeniden kalibrasyon yapmayı düşünün.