Limelight 2/2+ त्वरित-प्रारंभ

हार्डवेयर विनिर्देश
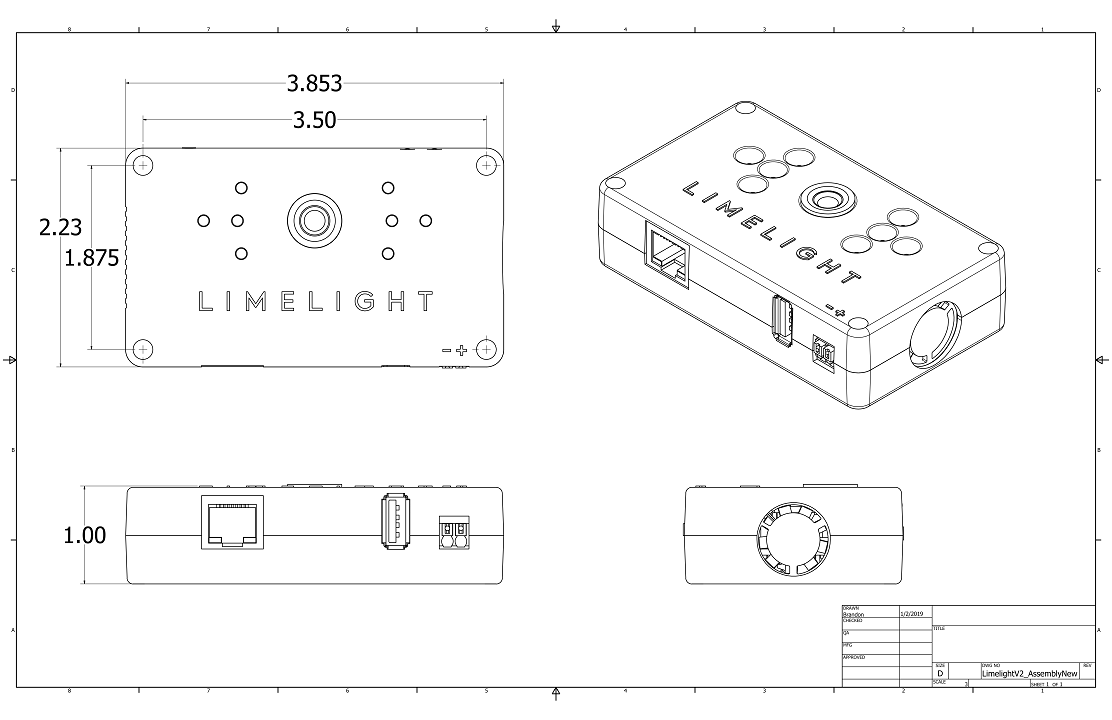
- फुटप्रिंट: 3.853in x 2.230in (97.87mm x 56.64mm)
- मोटाई: 1.000in (25.40mm)
- वजन: 0.17 lb
- #10 / M4 थ्रू-होल माउंटिंग
- पावर इनपुट: 4.1V-16V
- Limelight 2: अधिकतम 13W बिजली खपत
- Limelight 2+: अधिकतम 7W बिजली खपत (40% कमी)
- LED रोशनी:
- Limelight 2: 450 लुमेन, हरी रोशनी
- Limelight 2+: 500 लुमेन, पूरे तापमान रेंज में स्थिर चमक वाले LEDs
- सेंसर: OV5647 कलर रोलिंग शटर (320x240 @ 90FPS)
- बदलने योग्य M12 लेंस
- 62.5° क्षैतिज FOV, 48.9° लंबवत FOV
- काला प्रभाव-प्रतिरोधी पॉलीकार्बोनेट एनक्लोजर
- 10/100 ईथरनेट RJ45 पोर्ट
- USB-A होस्ट पोर्ट (USB 2.0)
- स्टेटस लाइट्स: हरा (टारगेट डिटेक्शन), पीला (नेटवर्क स्टेटस)
- Google Coral USB न्यूरल नेटवर्क एक्सेलेरेटर सपोर्ट
सॉफ्टवेयर क्षमताएं (Limelight OS)
- प्लग-एंड-प्ले उच्च-प्रदर्शन विजन। कोई अनुभव आवश्यक नहीं।
- विजन पाइपलाइन कॉन्फ़िगरेशन के लिए सेल्फ-होस्टेड ब्राउज़र-आधारित UI
- REST/HTTP, Websocket, NetworkTables, ModbusTCP, और ROS सपोर्ट
- कॉन्फ़िगर करने योग्य फिक्स्ड एक्सपोज़र, सेंसर गेन, रेज़ोल्यूशन, और फ्रेमरेट।
- 10 हॉट-स्वैपेबल विजन पाइपलाइन कॉन्फ़िगर करें:
- OpenCV 4.10, numpy, आदि के साथ कस्टम Python पाइपलाइन
- 2D, 3D AprilTag ट्रैकिंग और रोबोट लोकलाइज़ेशन
- MegaTag1 के साथ पूर्ण 3D लोकलाइज़ेशन (रोबोट GPS)
- MegaTag2 के साथ एक्सटर्नल IMU फ्यूज़न द्वारा उच्च-सटीकता पूर्ण 3D लोकलाइज़ेशन (रोबोट GPS)
- वेब इंटरफ़ेस में पूर्ण 3D विज़ुअलाइज़र
- 90FPS कलर ब्लॉब पाइपलाइन
- न्यूरल ऑब्जेक्ट डिटेक्शन पाइपलाइन
- न्यूरल इमेज क्लासिफिकेशन पाइपलाइन
- बारकोड ट्रैकिंग पाइपलाइन
- कम-लेटेंसी स्ट्रीमिंग के लिए व्यूफाइंडर पाइपलाइन
- बिल्ट-इन कम-लेटेंसी MJPEG स्ट्रीमिंग। कॉन्फ़िगर करने योग्य स्ट्रीम ओरिएंटेशन
1. Limelight 2/2+ माउंटिंग
थ्रू-होल माउंटिंग
- nylock नट्स के साथ 1 1/4" #10-32 या #10-24 स्क्रू का उपयोग करें
- वैकल्पिक रूप से, nylock नट्स के साथ 38mm M4 बोल्ट का उपयोग करें
- एनक्लोजर फिनिश को बनाए रखने के लिए प्लास्टिक वॉशर का उपयोग करें
2. Limelight 2/2+ वायरिंग
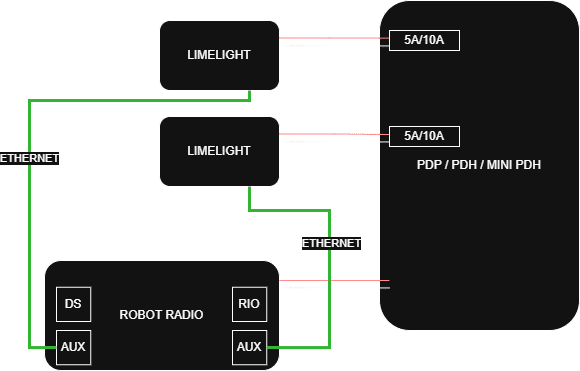
पावर
- अपने Limelight से अपने PDP/PDH पर एक स्लॉट तक दो 18-20AWG तार चलाएं
- उसी स्लॉट में 5A ब्रेकर जोड़ें
- (आवश्यक नहीं) सर्वोत्तम परिणामों के लिए Weidmuller फेरूल का उपयोग करें (चित्रित, Weidmuller 20AWG ऑरेंज फेरूल के साथ 20AWG तार)
- फेरूल:
- कम लागत वाले फेरूल क्रिम्प टूल्स:

ईथरनेट
- अपने Limelight से अपने रोबोट रेडियो तक एक ईथरनेट केबल चलाएं
- स्ट्रैंडेड तारों के साथ ट्विस्टेड Cat6 केबल का उपयोग करें (आदर्श रूप से 20AWG)
- अपनी ईथरनेट केबल में स्ट्रेन रिलीफ जोड़ें
3. वेब इंटरफ़ेस एक्सेस करना
अपने Limelight 2/2+ को अपने नेटवर्क से कनेक्ट करने के बाद:
- अपने रोबोट को पावर ऑन करें और अपने लैपटॉप को अपने रोबोट के नेटवर्क से कनेक्ट करें
- वेब इंटरफ़ेस एक्सेस करने के �लिए इनमें से किसी एक विधि का उपयोग करें:
- विधि 1: Limelight Hardware Manager एप्लिकेशन खोलें, Limelights के लिए स्कैन करें, और जब आपका Limelight दिखाई दे तो उस पर डबल-क्लिक करें
- विधि 2: एक वेब ब्राउज़र खोलें और
http://limelight.local:5801पर नेविगेट करें - विधि 3: एक वेब ब्राउज़र खोलें और पोर्ट 5801 के साथ अपने Limelight के स्टैटिक IP एड्रेस पर नेविगेट करें (यदि कॉन्फ़िगर किया गया हो)
कनेक्ट होने के बाद, आपके पास एक्सेस होगा:
- Settings टैब - टीम नंबर, होस्टनेम, और अन्य सिस्टम सेटिंग्स कॉन्फ़िगर करें
- Vision Pipeline टैब्स - अपनी विजन प्रोसेसिंग पाइपलाइन सेट अप और ट्यून करें
- Camera & Crosshair टैब - कैमरा सेटिंग्स और क्रॉसहेयर पैरामीटर एडजस्ट करें
सभी कॉन्फ़िगरेशन इस वेब इंटरफ़ेस के माध्यम से किया जाता है। परिवर्तन स्वचालित रूप से आपके Limelight में सेव हो जाते हैं।
4. LimelightOS अपडेट करना
अपग्रेड करने से पहले अपनी पाइपलाइन और स्क्रिप्ट का बैकअप लें - इस प्रक्रिया के दौरान वे मिटा दी जाएंगी!
- अपना Limelight पावर ऑफ करें
- नवीनतम USB ड्राइवर, Limelight OS इमेज, और Balena Flash टूल डाउनलोड करें
- अपने लैपटॉप से अपने Limelight तक USB->MicroUSB केबल चलाएं (आपका Limelight स्वचालित रूप से पावर ऑन हो जाएगा)
- "Balena Etcher" को एडमिनिस्ट्रेटर के रूप में चलाएं
- आपकी मशीन को कैमरा पहचानने में 20 सेकंड तक लग सकते हैं
- अपने डाउनलोड फ़ोल्डर में नवीनतम .zip इमेज चुने��ं
- "Drives" मेनू में "Compute Module" डिवाइस चुनें
- "Flash" पर क्लिक करें
- फ्लैशिंग पूरी होने के बाद, अपने Limelight से USB केबल निकालें
केवल इमेजिंग के दौरान micro-USB केबल कनेक्ट करें। जब microUSB केबल कनेक्ट होती है तो Limelight एक विशेष फ्लैश मोड में प्रवेश करता है। जब Limelight फ्लैश मोड में हो तो आप वेब इंटरफ़ेस एक्सेस नहीं कर पाएंगे।
5. नेटवर्क कॉन्फ़िगरेशन
टीम नंबर सेट करना (FRC / Networktables के लिए आवश्यक)
- अपने रोबोट को पावर ऑन करें और अपने लैपटॉप को अपने रोबोट के नेटवर्क से कनेक्ट करें
- Limelight Hardware Manager खोलें, Limelights के लिए स्कैन करें, और दिखाई देने वाली एंट्री पर डबल क्लिक करें
- वैकल्पिक रूप से, http://limelight.local:5801 पर नेविगेट करें
- "Settings" टैब पर जाएं
- अपना टीम नंबर दर्ज करें और "Update Team Number" दबाएं
यूनिक होस्टनेम सेट करना (केवल कई Limelights वाले FRC / Networktables सिस्टम के लिए आवश्यक)
- यदि आप कई Limelights का उपयोग कर रहे हैं, तो प्रत्येक Limelight का एक यूनिक होस्टनेम होना चाहिए
- Settings टैब में, एक होस्टनेम कॉन्फ़िगर करें और "set hostname" बटन पर क्लिक करें
स्टैटिक IP सेट करना (अनुशंसित, आवश्यक नहीं)
- "IP Assignment" को "Static" में बदलें
- IP एड्रेस को "10.TE.AM.11" पर सेट करें
- टीम 916 10.9.16.xx का उपयोग करती है
- टीम 9106 10.91.6.xx का उपयोग करती है
- टीम 9016 10.90.16.xx का उपयोग करती है
- Netmask को "255.255.255.0" पर सेट करें
- Gateway को "10.TE.AM.1" पर सेट करें
- "Update" पर क्लिक करें
- अपने रोबोट को पावर-साइकल करें
- अपने कॉन्फ़िग पैनल को 10.TE.AM.11:5801 पर और कैमरा स्ट्रीम को 10.TE.AM.11:5800 पर एक्सेस करें
- यदि आप कई Limelights का उपयोग कर रहे हैं, तो प्रत्येक Limelight को एक यूनिक स्टैटिक IP एड्रेस दें
प्र. हम स्टैटिक IP एड्रेस के उपयोग की अनुशंसा क्यों करते हैं?
उ. यह Limelight के बूट टाइम से कई सेकंड कम करता है। दूसरा, टीमों को ऐतिहासिक रूप से वास्तविक FRC फील्ड पर और इवेंट रेडियो फर्मवेयर के साथ DHCP असाइनमेंट और mDNS रेस्पॉन्डर्स में समस्याएं आई हैं।
हम आपके robo-rio और driverstation पर भी स्टैटिक IP एड्रेस सेट करने की अनुशंसा करते हैं। इन सभी डिवाइसों पर उपय�ोग करने के लिए नेटवर्किंग सेटिंग्स इस वेब पेज के निचले आधे हिस्से के पास मिल सकती हैं
6. LEDs को नियंत्रित करना
Limelight 2/2+ में बिल्ट-इन हरी रोशनी वाले LEDs शामिल हैं। इन LEDs को कई तरीकों से नियंत्रित किया जा सकता है:
वेब इंटरफ़ेस के माध्यम से
- वेब इंटरफ़ेस में Camera & Crosshair टैब पर नेविगेट करें
- चुनने के लिए LED Mode ड्रॉपडाउन का उपयोग करें:
- On - हमेशा चालू
- Off - हमेशा बंद
- Blink - LEDs ब्लिंक करें
- Pipeline - टारगेट डिटेक्ट होने पर LEDs चालू होते हैं
NetworkTables या API के माध्यम से
- "ledMode" वैल्यू सेट करें:
- 0: Pipeline डिफ़ॉल्ट
- 1: फोर्स ऑफ
- 2: फोर्स ब्लिंक
- 3: फोर्स ऑन
7. समस्या निवारण
स्टेटस लाइट इंडिकेटर्स
- हरी लाइट: धीरे ब्लिंक (कोई टारगेट नहीं), तेज़ ब्लिंक (टारगेट डिटेक्ट)
- पीली लाइट: ब्लिंक (कोई स्टैटिक IP नह��ीं), सॉलिड (स्टैटिक IP असाइन)
LED डायग्नोस्टिक पैटर्न
- बाएं/दाएं या ऊपर/नीचे बारी-बारी से ब्लिंक: आंतरिक कैमरा केबल अपनी जगह से हट गई है या इमेज सेंसर क्षतिग्रस्त है
- तेज़ ब्लिंक (सभी LEDs): नेटवर्किंग रीसेट बटन को कम से कम 10 सेकंड के लिए दबाया गया है
- बार-बार स्टार्टअप सीक्वेंस: सॉफ्टवेयर क्रैश हो रहा है, संभवतः हार्डवेयर क्षति के कारण
यदि limelight.local:5801 काम नहीं करता
- जांचें कि क्या आपके पास Bonjour इंस्टॉल है (Windows: add/remove programs)
- यदि आपके पास दो Bonjour आइटम हैं तो "bonjour print services" अनइंस्टॉल करें
- यदि गायब है तो Downloads पेज से Bonjour इंस्टॉल करें
IP एड्रेस रीसेट करें
- आपका Limelight बूट होने के बाद config बटन को 10 सेकंड के लिए दबाए रखें
- नेटवर्किंग कॉन्फ़िगरेशन अगले बूट पर डायनामिक एड्रेसिंग पर रीसेट हो जाएगा