सॉफ्टवेयर परिवर्तन लॉग 2021 - 2023
2023.6 (4/18/23)
आसान ChArUco कैलिब्रेशन और कैलिब्रेशन विज़ुअलाइज़र
- ChArUco कैलिब्रेशन को चेकरबोर्ड कैलिब्रेशन से बेहतर माना जाता है क्यों��कि यह ऑक्लूज़न, खराब कॉर्नर डिटेक्शन को संभालता है, और पूरे बोर्ड को दिखाई देने की आवश्यकता नहीं होती। इससे आपकी इमेज के किनारों और कोनों के पास कैलिब्रेशन बोर्ड कॉर्नर कैप्चर करना बहुत आसान हो जाता है। यह डिस्टॉर्शन कोएफिशिएंट एस्टिमेशन के लिए महत्वपूर्ण है।
- Limelight की कैलिब्रेशन प्रक्रिया हर कदम पर फीडबैक प्रदान करती है, और यह सुनिश्चित करेगी कि आप अच्छे कैलिब्रेशन परिणामों के लिए सब कुछ आवश्यक करें। इस प्रक्रिया को यथासंभव विश्वसनीय बनाने में बहुत प्रयास किया गया है।
- सबसे महत्वपूर्ण बात, आप अपने कैलिब्रेशन परिणामों को डिफ़ॉल्ट कैलिब्रेशन के बगल में विज़ुअलाइज़ कर सकते हैं। एक नज़र में, आप समझ सकते हैं कि आपका कैलिब्रेशन परिणाम उचित है या नहीं।
- आप कैलिब्रेशन डैशबोर्ड को एक लर्निंग टूल के रूप में भी उपयोग कर सकते हैं। आप डाउनलोड की गई कैलिब्रेशन परिणाम फ़ाइलों को संशोधित कर सकते हैं और उन्हें फिर से अपलोड करके सीख सकते हैं कि इंट्रिंसिक्स मैट्रिक्स और डिस्टॉर्शन कोएफिशिएंट टार्गेटिंग परिणामों, FOV आदि को कैसे प्रभावित करते हैं।
- इस वीडियो को देखें:
2023.5.1 & 2023.5.2 (3/22/23)
-
2023.5.0 में पेश किए गए रिग्रेशन को ठीक किया गया - जबकि 2023.5 ने सभी नॉन-प्लानर लेआउट के लिए megatag को ठीक किया, इसने सिंगल-टैग पोज़ एस्टिमेट के प्रदर्शन को कम कर दिया। इसे ठीक कर दिया गया है। सिंगल-टैग पोज़ एस्टिमेट 2023.4 में उपयोग किए गए उसी सॉल्वर का उपयोग करते हैं।
-
तेज़ स्नैपशॉट इंटरफ़ेस। स्नैपशॉट ग्रिड अब लो-रेज़ 128p थंबनेल लोड करता है।
-
Limelight Yaw अब 3D विज़ुअलाइज़र में ठीक से प्रस्तुत किया गया है। यह विज़ुअलाइज़र और आंतरिक रूप से ccw-positive है
-
फील्ड स्पेस विज़ुअलाइज़र में इंगित करें कि वर्तमान में कौन से टार्गेट ट्रैक किए जा रहे हैं
2023.5.0 (3/21/23)
ब्रेकिंग चेंजेस
- रिग्रेशन ठीक किया गया - Limelight Robot-Space "Yaw" पिछली रिलीज़ में इनवर्टेड था। वेब UI में Limelight yaw अब आंतरिक रूप से CCW-Positive है।
रीजन सिलेक्शन अपडेट
- रीजन सिलेक्शन अब न्यूरल डिटेक्टर पाइपलाइन में अपेक्षित �रूप से काम करता है।
- अनरोटेटेड टार्गेट रेक्टेंगल के सेंटर, टॉप, लेफ्ट, राइट, टॉप, या बॉटम को सिलेक्ट करने के लिए 5 नए रीजन ऑप्शन जोड़े गए।
"hwreport" REST API
- :5807/hwreport कैमरा इंट्रिंसिक्स और डिस्टॉर्शन जानकारी का विवरण देने वाला JSON रिस्पॉन्स लौटाएगा
MegaTag फिक्स
- कुछ नॉन-कोप्लानर apriltag लेआउट MegaTag में टूटे हुए थे। इसे ठीक कर दिया गया है, और पोज़ एस्टिमेशन अब सभी फील्ड टैग के साथ स्थिर है। यह पहले से भी अधिक दूरी पर स्थिर पोज़ एस्टिमेशन को सक्षम करता है।
अधिक tx और ty सटीकता
- TX और TY पहले से कहीं अधिक सटीक हैं। टार्गेट पूरी तरह से अनडिस्टॉर्टेड हैं, और FOV पूरी तरह से कैमरा इंट्रिंसिक्स द्वारा निर्धारित होता है।
2023.4.0 (2/18/23)
न्यूरल डिटेक्टर क्लास फिल्टर
अवांछित डिटेक्शन की आसान फिल्टरिंग के लिए उन क्लासेस को निर्दिष्ट करें जिन्हें आप ट्रैक करना चाहते हैं।
न्यूरल डिटेक्टर विस्तारित सपोर्ट
किसी भी इनपुट रेज़ोल्यूशन को सपोर्ट करें, अन्य ऑब्जेक्ट डिटेक्शन आर्किटेक्चर को सपोर्ट करने के लिए अतिरिक्त आउटपुट शेप को सपोर्ट करें। EfficientDet0-आधारित मॉडल अब सपोर्टेड हैं।
2023.3.1 (2/14/23)
AprilTag सटीकता सुधार
सभी मॉडलों के लिए बेहतर इंट्रिंसिक्स मैट्रिक्स और, सबसे महत्वपूर्ण, बेहतर डिस्टॉर्शन कोएफिशिएंट। ध्यान देने योग्य सिंगल AprilTag लोकलाइज़ेशन सुधार।
डिटेक्टर अपलोड
डिटेक्टर अपलोड ठीक किया गया।
2023.3 (2/13/23)
कैप्चर लेटेंसी (NT Key: "cl", JSON Results: "cl")
नई कैप्चर लेटेंसी एंट्री Limelight के इमेज सेंसर की मिडल रो के एक्सपोज़र के अंत और प्रोसेसिंग पाइपलाइन की शुरुआत के बीच के समय को दर्शाती है।
AprilTags के लिए नया क्वालिटी थ्रेशोल्ड
नए क्वालिटी थ्रेशोल्ड स्लाइड��र के साथ स्पूरियस AprilTags को अब अधिक आसानी से फिल्टर किया जा सकता है। 2023.3 में सेट किया गया डिफ़ॉल्ट मान अधिकांश स्पूरियस डिटेक्शन को हटा देना चाहिए।
रोबोट स्पेस ओवरराइड में कैमरा पोज़ (NT Keys: "camerapose_robotspace_set", "camerapose_robotspace")
आपके Limelight की रोबोट स्पेस में स्थिति अब ऑन-द-फ्लाई एडजस्ट की जा सकती है। यदि key को ज़ीरो के एरे पर सेट किया जाता है, तो वेब इंटरफ़ेस में सेट किया गया पोज़ उपयोग किया जाता है।
यहाँ एक एलिवेटर पर Limelight का उदाहरण है:

अधिकतम एक्सपोज़र बढ़ाया गया
अधिकतम एक्सपोज़र समय अब 33ms है (12.5 ms से बढ़ाया गया)। हाई-fps कैप्चर मोड अभी भी (1/fps) सेकंड तक सीमित हैं। उदाहरण के लिए, 90hz पाइपलाइन में 11ms एक्सपोज़र समय के बाद ब्राइटर इमेज नहीं होंगी।
Botpose अपडेट
NetworkTables में सभी तीन botpose एरे में कुल लेटेंसी (कैप्चर लेटेंसी + टार्गेटिंग लेटेंसी) को दर्शाने वाली सातवीं एंट्री है।
बगफिक्स
- Shuffleboard में LL3 MJPEG स्ट्रीम ठीक किया गया
- camMode ठीक किया गया - ड्राइवर मोड अब ब्राइट, उपयोग योग्य इमेज प्रोड्यूस करता है।
- एक्सपोज़र लेबल को सही किया गया है - प्रत्येक "tick" 0.01ms को दर्शाता है न कि 0.1 ms को
- न्यूरल नेट डिटेक्टर अपलोड ठीक किया गया
2023.2 (1/28/23)
3D को पहले से कहीं अधिक आसान बनाना।
WPILib-संगत Botposes
Botpose अब आउट-ऑफ-द-बॉक्स उपयोग करना और भी आसान है।
ये WPILib कोऑर्डिनेट सिस्टम से मेल खाते हैं। 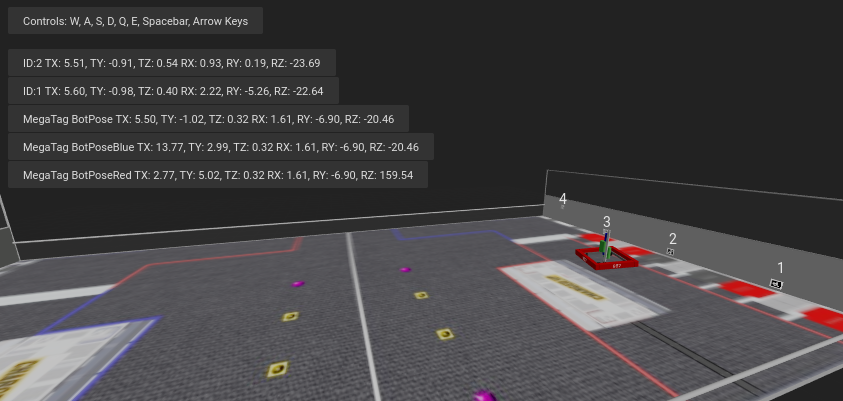
सभी botposes सीधे वेब इंटरफ़ेस में फील्ड-स्पेस विज़ुअलाइज़र में प्रिंट होते हैं, जिससे एक नज़र में यह पुष्टि करना आसान हो जाता है कि सब कुछ ठीक से काम कर रहा है।
3D डेटा तक आसान पहुंच (ब्रेकिंग चेंजेस)
TargetSpace में RobotPose AprilTags के संबंध में Limelight से आने वाला सबसे उपयोगी डेटा है। केवल इसका उपयोग करके, आप फील्ड पर AprilTag के साथ ड्राइवट्रेन को पूरी तरह से अलाइन कर सकते हैं।
- NetworkTables Key "campose" अब "camerapose_targetspace" है
- NetworkTables Key "targetpose" अब "targetpose_cameraspace" है
- नई NetworkTables Key - "targetpose_robotspace"
- नई NetworkTables Key - "botpose_targetspace"
न्यूरल नेट अपलोड
Limelight Classifier Pipeline में teachable machine मॉडल अपलोड करें। सुनिश्चित करें कि वे Tensorflow Lite EdgeTPU संगत मॉडल हैं। .tflite और .txt लेबल फ़ाइलें अलग-अलग अपलोड करें।
2023.1 (1/19/23)
MegaTag और परफॉर्मेंस बूस्ट
एक गलती को सुधारना
UI में डिफ़ॉल्ट मार्कर साइज़ पैरामीटर को 152.4mm (203.2mm से कम) में सही किया गया है। यह अधिकांश सटीकता समस्याओं की जड़ थी।
बढ़ी हुई ट्रैकिंग स्थिरता
AprilTag डिटेक्शन और डिकोडिंग को ट्यून करने के कई तरीके हैं। हमने पूरे बोर्ड में स्थिरता में सुधार किया है, विशेष रूप से कम रोशनी / कम एक्सपो��ज़र वातावरण में।
अल्ट्रा फास्ट ग्रेस्केलिंग
ग्रेस्केलिंग पहले की तुलना में 3x-6x तेज़ है। AprilTags ट्रैक करते समय टीमें हमेशा ग्रे वीडियो स्ट्रीम देखेंगी।
परफॉर्मेंस के लिए क्रॉपिंग
AprilTag पाइपलाइन में अब क्रॉप स्लाइडर हैं। अपनी इमेज को क्रॉप करने से किसी भी रेज़ोल्यूशन पर बेहतर फ्रेमरेट मिलेगा।
आसान फिल्टरिंग
AprilTag पाइपलाइन में अब एक सिंगल "ID filter" फील्ड है जो JSON आउटपुट, botpose-enabled टैग, और tx/ty-enabled टैग को फिल्टर करता है। डुअल-फिल्टर सेटअप बग्गी और भ्रमित करने वाला था।
ब्रेकिंग चेंज
NT Key "camtran" अब "campose" है
JSON अपडेट
"botpose" अब json results dump का हिस्सा है
फील्ड स्पेस विज़ुअलाइज़र अपडेट
फील्ड-स्पेस विज़ुअलाइज़र अब 2023 FRC फील्ड दिखाता है। अब एक नज़र में botpose सटीकता का आकलन करना आसान होना चाहिए।
Limelight MegaTag (नया botpose)
मेरी #1 प्राथमिकता अधिक सटीकता, कम शोर, और एम्बिगुइटी रेज़िलिएंस के लिए botpose को फिर से लिखना रही है। Limelight का नया botpose इम्प्लीमेंटेशन MegaTag कहलाता है। कई व्यक्तिगत फील्ड-स्पेस पोज़ के डंब एवरेज के साथ botpose की गणना करने के बजाय, MegaTag अनिवार्य रूप से सभी टैग को कई कीपॉइंट के साथ एक विशाल 3D टैग में जोड़ता है। इसके भारी लाभ हैं।
निम्नलिखित GIF टैग फ्लिपिंग को प्रेरित करने के लिए डिज़ाइन की गई स्थिति दिखाता है: ग्रीन सिलेंडर: व्यक्तिगत प्रति-टैग बॉट पोज़ ब्लू सिलेंडर: 2023.0.1 BotPose व्हाइट सिलेंडर: नया MegaTag Botpose
ध्यान दें कि नया botpose (व्हाइट सिल�ेंडर) पुराने botpose (ब्लू सिलेंडर) की तुलना में कितना स्थिर है। आप tx और ty वैल्यू भी देख सकते हैं।
यहाँ पूर्ण स्क्रीन है, जो टैग एम्बिगुइटी दिखाती है:
यहाँ फायदे हैं:
Botpose अब एम्बिगुइटी (टैग फ्लिपिंग) के प्रति रेज़िलिएंट है यदि एक से अधिक टैग दृश्य में हैं (जब तक कि वे करीब और कोप्लानर न हों। आदर्श रूप से कीपॉइंट कोप्लानर नहीं हैं)। Botpose अब टैग कॉर्नर में शोर के प्रति अधिक रेज़िलिएंट है यदि एक से अधिक टैग दृश्य में हैं। टैग एक दूसरे से जितने दूर हैं, उतना बेहतर है। यह प्लानर टैग तक सीमित नहीं है। यह किसी भी संख्या में टैग के लिए पूर्ण 3D में और किसी भी ओरिएंटेशन में स्केल करता है। फ्लोर टैग और सीलिंग टैग पूरी तरह से काम �करेंगे।
यहाँ एक डायग्राम है जो दर्शाता है कि यह एक सरल प्लानर केस के साथ कैसे काम करता है। परिणाम वास्तव में दर्शाए गए से बेहतर हैं, क्योंकि दर्शाए गए MegaTag में एक पॉइंट के बजाय तीन पॉइंट पर एक महत्वपूर्ण एरर लागू है। जैसे-जैसे 3D कंबाइंड MegaTag साइज़ और कीपॉइंट काउंट में बढ़ता है, इसकी स्थिरता बढ़ती है।
न्यूरल नेट अपलोड को 2023.2 में पुश किया जा रहा है!
2023.0.0 और 2023.0.1 (1/11/23)
AprilTags, रोबोट लोकलाइज़ेशन, डीप न्यूरल नेटवर्क, एक फिर से लिखा गया स्क्रीनशॉट इंटरफ़ेस, और बहुत कुछ पेश करना।
फीचर्स, चेंजेस, और बगफिक्स
- नई सेंसर कैप्चर पाइपलाइन और गेन कंट्रोल
- हमारी नई कैप्चर पाइपलाइन 2022 में जो थे उससे 100x छोटे एक्सपोज़र समय की अनुमति देती है। नई पाइपलाइन गेन कंट्रोल को भी सक्षम करती है। यह AprilTags ट्रैकिंग के लिए अत्यंत महत्वपूर्ण है, और रेट्रोरिफ्लेक्टिव टार्गेटिंग को पहले से कहीं अधिक विश्वसनीय बनाने का काम करेगा। Limelight OS 2023 से पहले, Limelight का सेंसर गेन नॉन-डिटर्मिनिस्टिक था (हमने इसे वैसे भी काम करने के लिए कुछ ट्रिक्स लागू किए)।
- नए "Sensor Gain" स्लाइडर के साथ, टीमें एक्सपोज़र स्लाइडर को छुए बिना इमेज को पहले से कहीं अधिक डार्क या ब्राइट बना सकती हैं। गेन बढ़ाने से इमेज में शोर बढ़ेगा।
- नए कम एक्सपोज़र समय के साथ कम गेन को मिलाकर, अब फुल-ब्राइटनेस LEDs और रेट्रोरिफ्लेक्टिव टार्गेट के साथ लगभग पूरी तरह से ब्लैक इमेज प्रोड्यूस करना संभव है। यह रेट्रोरिफ्लेक्टिव टार्गेट ट्रैक करते समय LED और सनलाइट रिफ्लेक्शन को कम करने में मदद करेगा।
- सेंसर गेन बढ़ाकर और एक्सपोज़र कम करके, टीमें AprilTags ट्रैक करते समय हाई एक्सपोज़र समय के कारण मोशन ब्लर के प्रभावों को कम करने में सक्षम होंगी।
- हमने सभी फीचर्स को बनाए रखते हुए इस नई पाइपलाइन को विकसित करने में कामयाबी हासिल की है - 90fps, हार्डवेयर ज़ूम, आदि।
- अधिक रेज़ोल्यूशन ऑप्शन
- LL1, LL2, और LL2+ के लिए दो नए कैप्चर रेज़ोल्यूशन हैं: 640x480x90fps, और 1280x960x22fps
- ऑप्टिमाइज़्ड वेब इंटरफ़ेस
- वेब GUI अब रोबोट नेटवर्क पर 3x तेज़ी से लोड और इनिशियलाइज़ होगा।
- फिर से लिखा गया स्नैपशॉट इंटरफ़ेस
- स्नैपशॉट फीचर को इमेज अपलोड, इमेज डाउनलोड, और इमेज डिलीशन की अनुमति देने के लिए पूरी तरह से फिर से लिखा गया है। डॉक्यूमेंटेशन में स्नैपशॉट कैप्चर करने के लिए नए APIs भी विस्तृत हैं।
- SolvePnP सुधार
- हमारे solvePnP-आधारित कैमरा लोकलाइज़ेश�न फीचर में एक खराब बग था जो हर चार फ्रेम में इसकी सटीकता को गंभीर रूप से सीमित कर रहा था। इसे संबोधित किया गया है, और Retroreflective/Color SolvePNP विज़ुअलाइज़ेशन के लिए एक बिल्कुल नया फुल 3D कैनवास बनाया गया है।
- वेब इंटरफ़ेस बगफिक्स
- 2022 में एक अत्यंत दुर्लभ समस्या थी जिसने फ्लैशिंग के बाद पहले बूट के दौरान वेब इंटरफ़ेस को स्थायी रूप से तोड़ दिया, जिसने यूज़र को फिर से फ्लैश करने के लिए मजबूर किया। मूल कारण पाया गया और हमेशा के लिए ठीक कर दिया गया।
- नए APIs
- Limelight में अब REST और Websocket APIs शामिल हैं। REST, Websocket, और NetworkTables APIs सभी नए JSON dump फीचर को सपोर्ट करते हैं, जो FRC और अन्य सभी एप्लिकेशन के लिए सभी टार्गेट के लिए सभी डेटा को ह्यूमन रीडेबल, सिंपल-टू-पार्स फॉर्मेट में सूचीबद्ध करता है।
ज़ीरो-कोड लर्निंग-बेस्ड विज़न और Google Coral सपोर्ट
- Google Coral अब सभी Limelight मॉडल द्वारा सपोर्टेड है। Google Coral एक 4TOPs (ट्रिलियन-ऑफ-ऑपरेशंस / सेकंड) USB हार्डवेयर एक्सेलेरेटर है जो 8-बिट न्यूरल नेटवर्क पर इनफरेंस के लिए विशेष रूप से बनाया गया है।
- कुछ साल पहले रेट्रोरिफ्लेक्टिव ट्रैकिंग की तरह, FRC रोबोट पर लर्निंग-बेस्ड विज़न के लिए एंट्री की बाधा औसत टीम के लिए प्रयास करने के लिए भी बहुत अधिक रही है। हमने Limelight के साथ लर्निंग-बेस्ड विज़न को रेट्रोरिफ्लेक्टिव टार्गेट जितना आसान बनाने के लिए आवश्यक सभी इंफ्रास्ट्रक्चर विकसित किए हैं।
- हमारे पास एक क्लाउड GPU क्लस्टर, ट्रेनिंग स्क्रिप्ट, एक डेटासेट एग्रीगेशन टूल, और एक ह्यूमन लेबलिंग टीम तैयार है। हम पहली बार FRC कम्युनिटी में डीप न्यूरल नेटवर्क लाने के लिए उत्साहित हैं।
- हम वर्तमान में दो प्रकार के मॉडल सपोर्ट करते हैं: ऑब्जेक्ट डिटेक्शन मॉडल, और इमेज क्लासिफिकेशन मॉडल।
- ऑब्जेक्ट डिटेक्शन मॉडल सभी डिटेक्टेड ऑब्जेक्ट के लिए "class IDs" और बाउंडिंग बॉक्स (हमारे रेट्रोरिफ्लेक्टिव टार्गेट की तरह) प्रदान करेंगे। यह रियल-टाइम गेम पीस ट्रैकिंग के लिए परफेक्ट है।
- कृपया यहाँ इमेज सबमिट करके पहले-कभी FRC ऑब्जेक्ट डिटेक्शन मॉडल में योगदान दें: https://datasets.limelightvision.io/frc2023
- डिटेक्शन नेटवर्क का उपयोग करने के लिए tx, ty, ta, और tclass networktables keys या JSON dump का उपयोग करें
- इमेज क्लासिफिकेशन मॉडल एक इमेज इनजेस्ट करेंगे, और एक सिंगल क्लास लेबल प्रोड्यूस करेंगे।
- अधिक जानने और Limelight के लिए अपने खुद के मॉडल ट्रेन करना शुरू करने के लिए, Google द्वारा Teachable Machine देखें।
- https://www.youtube.com/watch?v=T2qQGqZxkD0
- Teachable machine मॉडल सीधे Limelight के साथ संगत हैं।
- इमेज क्लासिफायर का उपयोग इंटरनल रोबोट स्टेट, फील्ड फीचर्स की स्थिति, और बहुत कुछ को क्लासिफाई करने के लिए किया जा सकता है।
- इन मॉडलों का उपयोग करने के लिए tclass networktables key का उपयोग करें।
- ऑब्जेक्ट डिटेक्शन मॉडल सभी डिटेक्टेड ऑब्जेक्ट के लिए "class IDs" और बाउंडिंग बॉक्स (हमारे रेट्रोरिफ्लेक्टिव टार्गेट की तरह) प्रदान करेंगे। यह रियल-टाइम गेम पीस ट्रैकिंग के लिए परफेक्ट है।
- Limelight OS 2023.0 कस्टम मॉडल अपलोड करने की क्षमता प्रदान नहीं करता है। यह जल्द ही 2023.1 में सक्षम किया जाएगा
ज़ीरो-कोड AprilTag सपोर्ट
- AprilTags Limelight के साथ रेट्रोरिफ्लेक्टिव टार्गेट जितने आसान हैं। क्योंकि उनके पास ID के रूप में एक नेचुरल हार्ड फिल्टर है, आपके roboRIO को कोई विज़न-संबंधित फिल्टरिंग करने का और भी कम कारण है।
- शुरू करने के लिए, tx, ty, और ta का सामान्य रूप से उपयोग करें। ज़ीरो कोड चेंजेस की आवश्यकता है। किसी भी टार्गेट विशेषता के आधार पर सॉर्ट करें, टार्गेट ग्रुप का उपयोग करें, आदि।
- क्योंकि AprilTags हमेशा स्क्वायर और हमेशा यूनिकली आइडेंटिफिएबल होते हैं, वे फुल 3D पोज़ कैलकुलेशन के लिए परफेक्ट प्लेटफॉर्म प्रदान करते हैं।
- हमारे सपोर्ट चैनलों में इस फीचर के लिए हमें जो फीडबैक मिला है वह अत्यंत सकारात्मक रहा है। हमने AprilTags को यथासंभव आसान बनाया है, 2D ट्रैकिंग से लेकर फील्ड पर फुल 3D रोबोट लोकलाइज़ेशन तक
- अधिक विस्तृत जानकारी के लिए Field Map Specification और Coordinate System Doc देखें।
- Limelight के साथ AprilTags का उपयोग करने के चार तरीके हैं:
- 2D में AprilTags
- tx, ty, और ta का उपयोग करें। एक विशिष्ट टैग ID खोजने के लिए अपनी पाइपलाइन कॉन्फ़िगर करें।
<gif>
- पॉइंट-ऑफ-इंटरेस्ट 3D AprilTags
- tx और ty, ta, और tid networktables keys का उपयोग करें। पॉइंट ऑफ इंटरेस्ट ऑफसेट वह सब है जो अधिकांश ट�ीमों को उन टार्गेट को ट्रैक करने के लिए चाहिए जिनमें सीधे AprilTags अटैच नहीं हैं।
<gif>
- फुल 3D
- अपने LL, अपने रोबोट, या टैग को फुल 3D में ट्रैक करें। अपने roboRio में प्रासंगिक डेटा खींचने के लिए campose या json का उपयोग करें।
<gif>
- फील्ड-स्पेस रोबोट लोकलाइज़ेशन
- अपने Limelight को बताएं कि यह कैसे माउंटेड है, एक फील्ड मैप अपलोड करें, और आपका LL WPILib Pose Estimator के साथ उपयोग के लिए आपके रोबोट का फील्ड पोज़ प्रदान करेगा।
- हमारा फील्ड कोऑर्डिनेट सिस्टम (0,0) को कॉर्नर के बजाय फील्ड के सेंटर में रखता है।
- इस फीचर के लिए botpose networktables key का उपयोग करें।
<gif>
2022.3.0 (4/13/22)
बगफिक्स और हार्टबीट।
बगफिक्स
- USB Camera स्ट्रीम और मल्टीपल स्ट्रीम इंस्टेंस से संबंधित परफॉर्मेंस, स्ट्रीम स्टेबिलिटी, और स्ट्रीम लैग समस्याओं को ठीक किया गया।
फीचर्स और चेंजेस
- "hb" Heartbeat NetworkTable key
- "hb" वैल्यू प्रति प्रोसेसिंग फ्रेम एक बार इंक्रीमेंट होती है, और 2000000000 पर ज़ीरो पर रीसेट होती है।
2022.2.3 (3/16/22)
बगफिक्स और रोबोट-कोड क्रॉप फिल्टरिंग।
बगफिक्स
- "stream" networktables key और Picture-In-Picture Modes ठीक किए गए
- "snapshot" networktables key ठीक किया गया। स्क्रीनशॉट ल��ेने के लिए यूज़र को "snapshot" key को "1" पर सेट करने से पहले "0" पर सेट करना होगा।
- वेब इंटरफ़ेस से अनावश्यक python-संबंधित अलर्ट हटाए गए
फीचर्स और चेंजेस
- मैनुअल क्रॉप फिल्टरिंग
- "crop" networktables array का उपयोग करके, टीमें अब रोबोट कोड से क्रॉप रेक्टेंगल को कंट्रोल कर सकती हैं।
- "crop" key के काम करने के लिए, वर्तमान पाइपलाइन को डिफ़ॉल्ट, वाइड-ओपन क्रॉप रेक्टेंगल का उपयोग करना चाहिए (minX और minY के लिए -1, maxX और maxY के लिए +1)।
- इसके अलावा, "crop" networktable array में बिल्कुल 4 वैल्यू होनी चाहिए, और उन वैल्यू में से कम से कम एक नॉन-ज़ीरो होनी चाहिए।
2022.2.2 (2/23/22)
Week 0 और FMS रिलायबिलिटी टेस्टिंग के आधार पर सभी टीमों के लिए अनिवार्य अपग्रेड।
बगफिक्स
- ओपन वेब इंटरफ़ेस, FMS, FMS-जैसे सेटअप, मल्टीपल व्यूअर डिवाइस आदि से संबंधित हैंग / कनेक्शन लॉस / टार्गेटिंग लॉस को ठीक किया गया।
फीचर्स और चेंजेस
-
क्रॉप फिल्टरिंग
- एक निर्दिष्ट क्रॉप रेक्टेंगल के बाहर सभी पिक्सेल को इग्नोर करें
- यदि आपके फ्लाईव्हील में फील्ड पर कोई स्वीट स्पॉट है, तो आप विशिष्ट पाइपलाइन में अधिकांश पिक्सेल को इग्नोर करने के लिए क्रॉप फिल्टर का उपयोग कर सकते हैं। यह फीचर टीमों को नॉन-टार्गेट ट्रैक करने की संभावना को कम करने में मदद करना चाहिए।
- यदि आप कार्गो ट्रैक कर रहे हैं, तो इस फीचर का उपयोग केवल इमेज के एक विशिष्ट भाग में कार्गो खोजने के लिए करें। अपनी टीम के बंपर, दूर के टार्गेट आदि को इग्नोर करने पर विचार करें।
-
कॉर्नर फीचर अब स्मार्ट टार्गेट ग्रुपिंग के साथ संगत है
- यह उन टीमों के लिए है जो RIO पर अधिक एडवांस्ड कस्टम विज़न करना चाहती हैं
- "tcornxy" कॉर्नर लिमिट 64 कॉर्नर तक बढ़ाई गई
- कंटूर सिम्प्लीफिकेशन और फोर्स कॉन्वेक्स फीचर अब स्मार्ट टार्गेट ग्रुपिंग और कॉर्नर सेंडिंग के साथ ठीक से काम करते हैं
-
IQR Filter max 3.0 तक बढ़ाया गया
-
वेब इंटरफ़ेस ओपन होने पर बैंडविड्थ और cpu लोड को कम करने के लिए वेब इंटरफ़ेस लाइव टार्गेट अपडेट रेट 30fps से 15fps तक कम किया गया
2022.1 (1/25/22)
बग फिक्स
- हमने अपने एक सप्लायर से एक समस्या (और उसका समाधान!) के बारे में जानकारी प्राप्त की जो विशेष रूप से Limelight 2 में उपयोग किए जाने वाले लगभग 1/75 CPUs को प्रभावित करती है (यह किसी विशेष बैच से संबंधित हो सकती है)। यह समझ में आता है, और यह 2022 इमेज और 2020 इमेज के बीच बचे हुए बूट अंतरों में से एक था।
- GRIP इनपुट और SolvePNP मॉडल के लिए अपलोड बटन को ठीक किया
फीचर्स
-
Hue Rainbow
- नया hue rainbow, hue threshold को कॉन्फ़िगर करना आसान बनाता है।
-
Hue Inversion
- नया hue inversion फीचर एक महत्वपूर्ण फीचर है यदि आप लाल वस्तुओं को ट्रैक करना चाहते हैं, क्योंकि लाल रंग hue रेंज के शुरुआत और अंत दोनों में होता है:
-
नई Python लाइब्रेरीज़
- हमारे python sandbox में scipy, scikit-image, pywavelets, pillow, और pyserial जोड़े गए।
2022.0 और 2022.0.3 (1/15/22)
यह एक बड़ा अपडेट है। यहाँ चार प्राथमिक बदलाव हैं:
फीचर्स
-
Smart Target Grouping
- उन टारगेट्स को स्वचालित रूप से ग्रुप करें जो सभी व्यक्तिगत टारगेट फ़िल्टर पास करते हैं।
- -group size slider minimum- और -group size slider maximum- के बीच किसी भी संख्या में टारगेट्स को डायनामिक रूप से ग्रुप करेगा
-
Outlier Rejection
- हालांकि यह गोल अन्य गोल्स की तुलना में अधिक चुनौतीपूर्ण है, यह हमें फ़िल्टरिंग के लिए अधिक अवसर देता है। अवधारणात्मक रूप से, यह गोल सिर्फ एक "green blob" से अधिक है। चूंकि हम जानते हैं कि गोल कई टारगेट्स से बना है जो एक दूसरे के करी��ब हैं, हम वास्तव में उन outlier टारगेट्स को रिजेक्ट कर सकते हैं जो अकेले खड़े हैं।
- इस साल के गोल के लिए आपको लगभग पूरी तरह से अच्छी टारगेट फ़िल्टरिंग पर निर्भर रहना चाहिए, और केवल तभी outlier rejection का उपयोग करना चाहिए जब आप अपनी कैमरा स्ट्रीम में spurious outliers देखते हैं या उनकी उम्मीद करते हैं। यदि आपकी स्टैंडर्ड टारगेट फ़िल्टरिंग खराब है, तो outlier detection आपके खिलाफ काम करना शुरू कर सकता है!
-
Limelight 2022 Image अपग्रेड हमने अपने सॉफ्टवेयर से सैकड़ों moving parts हटा दिए हैं। ये परिणाम हैं:
- Compressed Image Size: 2020 में 1.3 GB → 2022 के लिए 76MB (17 गुना कम!)
- Download time: 2020 में 10s मिनट → 2022 के लिए सेकंड
- Flash time: 2020 में 5+ मिनट → 2022 के लिए सेकंड
- Boot time: 2020 में 35+ सेकंड → 2022 के लिए 14 सेकंड (LEDS ऑन होने में 10 सेकंड)
-
Full Python Scripting
- Limelight ने सफलतापूर्वक बड़ी संख्या में छात्रों को रोबोटिक्स में कंप्यूटर विज़न की कुछ क्षमताओं से परिचित कराया है। Python scripting के साथ, टीमें अब अपनी खुद की image processing pipelines लिखकर एक कदम आगे बढ़ सकती हैं।
-
यह अपडेट Limelight 1 सहित सभी Limelight Hardware के साथ संगत है।
-
ज्ञात समस्याएं: Python के साथ hardware zoom का उपयोग करने से अप्रत्याशित परिणाम मिलेंगे।
-
2022.0.3 5802 GRIP स्ट्रीम को पुनर्स्थापित करता है, और कुछ boot time optimizations को वापस करके कुछ LL2 यूनिट्स पर boot समस्याओं को संबोधित करता है। Boot time बढ़कर 16 सेकंड हो गया है।