מערכות קואורדינטות תלת-ממדיות בפירוט
מרחב מצלמת Limelight
מערכת קואורדינטות קרטזית תלת-ממדית עם (0,0,0) בעדשת המצלמה.
X+ ← מצביע ימינה (אם הייתם מגלמים את המצלמה)
Y+ ← מצביע כלפי מטה
Z+ ← מצביע החוצה מהמצלמה
מרחב המטרה
מערכת קואורדינטות קרטזית תלת-ממדית עם (0,0,0) במרכז המטרה.
X+ ← מצביע ימינה מהמטרה (אם אתם מסתכלים על המטרה)
Y+ ← מצביע כלפי מטה
Z+ ← מצביע החוצה מהמטרה (ניצב למישור המטרה).
מרחב הרובוט
מערכת קואורדינטות קרטזית תלת-ממדית עם (0,0,0) ממוקם במרכז מסגרת הרובוט מוקרן לרצפה.
X+ ← מצביע קדימה (וקטור קדימה)
Y+ ← מצביע לכיוון ימין הרובוט (וקטור ימין)
Z+ ← מצביע כלפי מעלה (וקטור מעלה)
מרחב המגרש (FTC)
מערכת קואורדינטות קרטזית תלת-ממדית עם (0,0,0) ממוקם במרכז המגרש
מרחב המגרש (FTC יהלום)
מערכת קואורדינטות קרטזית תלת-ממדית עם (0,0,0) ממוקם במרכז המגרש
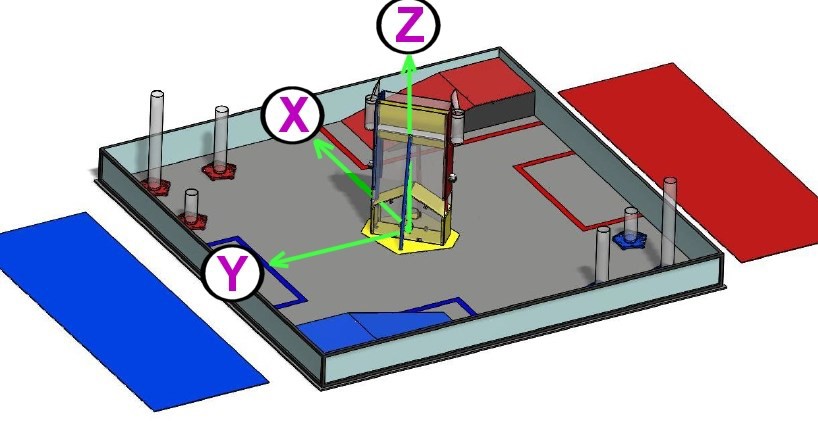
מרחב המגרש (FRC) (בשימוש על ידי מחולל המפות)
מערכת קואורדינטות קרטזית תלת-ממדית עם (0,0,0) ממוקם במרכז המגרש
X+ ← מצביע לאורך הצד הארוך של המגרש
Y+ ← מצביע למעלה לאורך הצד הקצר של המגרש
Z+ ← מצביע לכיוון השמיים
ימנית. תטא חיובי גורם לסיבוב נגד כיוון השעון מפרספקטיבה חיצונית חיובית
מרחב המגרש (FRC WPIBlue) (מרחב המגרש המועדף לכל קבוצות FRC)
בדיוק כמו מערכת הקואורדינטות הסטנדרטית של FRC, אבל עם (0,0,0) בנקודת המוצא של הברית הכחולה.

מרחב המגרש (FRC WPIRed) (אל תשתמשו בזה)
בדיוק כמו מערכת הקואורדינטות הסטנדרטית של FRC, אבל עם (0,0,0) בנקודת המוצא של הברית האדומה ומסובב ב-180 מעלות.
