Sistemas de Coordenadas 3D en Detalle
Espacio de Cámara Limelight
Sistema de Coordenadas Cartesianas 3D con (0,0,0) en el lente de la cámara.
X+ → Apuntando hacia la derecha (si encarnaras la cámara)
Y+ → Apuntando hacia abajo
Z+ → Apuntando hacia afuera de la cámara
Espacio del Objetivo
Sistema de Coordenadas Cartesianas 3D con (0,0,0) en el centro del objetivo.
X+ → Apuntando hacia la derecha del objetivo (si estás mirando el objetivo)
Y+ → Apuntando hacia abajo
Z+ → Apuntando hacia afuera del objetivo (ortogonal al plano del objetivo).
Espacio del Robot
Sistema de Coordenadas Cartesianas 3D con (0,0,0) ubicado en el centro del chasis del robot proyectado hacia el suelo.
X+ → Apuntando hacia adelante (Vector Adelante)
Y+ → Apuntando hacia la derecha del robot (Vector Derecha)
Z+ → Apuntando hacia arriba (Vector Arriba)
Espacio del Campo (FTC)
Sistema de Coordenadas Cartesianas 3D con (0,0,0) ubicado en el centro del campo
Espacio del Campo (FTC Diamante)
Sistema de Coordenadas Cartesianas 3D con (0,0,0) ubicado en el centro del campo
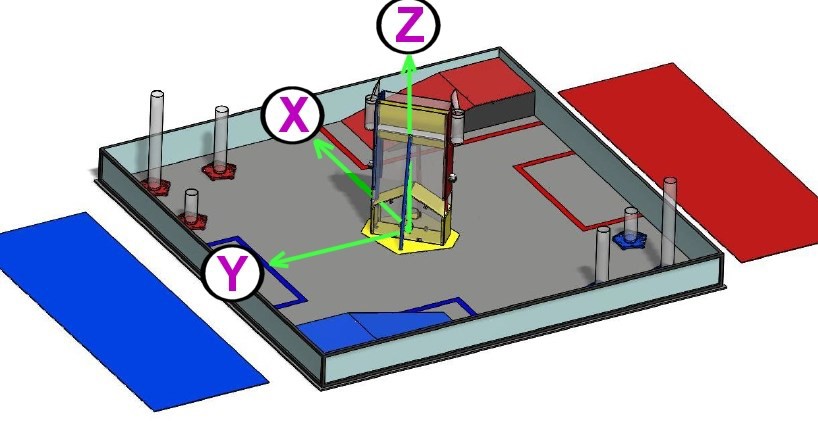
Espacio del Campo (FRC) (Usado por el generador de mapas)
Sistema de Coordenadas Cartesianas 3D con (0,0,0) ubicado en el centro del campo
X+ → Apunta a lo largo del lado largo del campo
Y+ → Apunta hacia arriba del lado corto del campo
Z+ → Apunta hacia el cielo
Mano derecha. Theta positivo resulta en rotación antihoraria desde la perspectiva exterior positiva
Espacio del Campo (FRC WPIBlue) (Espacio de Campo Preferido para todos los Equipos FRC)
Igual que el sistema de coordenadas estándar de FRC, pero con (0,0,0) en el origen de la alianza azul.

Espacio del Campo (FRC WPIRed) (No usar esto)
Igual que el sistema de coordenadas estándar de FRC, pero con (0,0,0) en el origen de la alianza roja y rotado 180 grados.
