Systèmes de Coordonnées 3D en Détail
Espace Caméra Limelight
Système de coordonnées cartésiennes 3D avec (0,0,0) à l'objectif de la caméra.
X+ → Pointe vers la droite (si vous incarniez la caméra)
Y+ → Pointe vers le bas
Z+ → Pointe vers l'extérieur de la caméra
Espace Cible
Système de coordonnées cartésiennes 3D avec (0,0,0) au centre de la cible.
X+ → Pointe vers la droite de la cible (si vous regardez la cible)
Y+ → Pointe vers le bas
Z+ → Pointe vers l'extérieur de la cible (orthogonal au plan de la cible).
Espace Robot
Système de coordonnées cartésiennes 3D avec (0,0,0) situé au centre du châssis du robot projeté au sol.
X+ → Pointe vers l'avant (Vecteur avant)
Y+ → Pointe vers la droite du robot (Vecteur droit)
Z+ → Pointe vers le haut (Vecteur haut)
Espace Terrain (FTC)
Système de coordonnées cartésiennes 3D avec (0,0,0) situé au centre du terrain
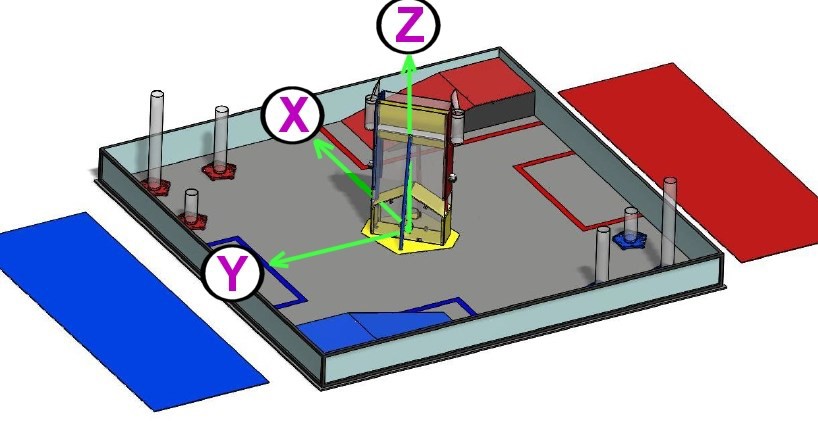
Espace Terrain (FTC Diamant)
Système de coordonnées cartésiennes 3D avec (0,0,0) situé au centre du terrain
Espace Terrain (FRC) (Utilisé par le générateur de carte)
Système de coordonnées cartésiennes 3D avec (0,0,0) situé au centre du terrain
X+ → Pointe le long du côté long du terrain
Y+ → Pointe vers le haut du côté court du terrain
Z+ → Pointe vers le ciel
Main droite. Un thêta positif entraîne une rotation antihoraire depuis une perspective extérieure positive
Espace Terrain (FRC WPIBlue) (Espace terrain préféré pour toutes les équipes FRC)
Identique au système de coordonnées FRC standard, mais avec (0,0,0) à l'origine de l'alliance bleue.

Espace Terrain (FRC WPIRed) (Ne pas utiliser)
Identique au système de coordonnées FRC standard, mais avec (0,0,0) à l'origine de l'alliance rouge et pivoté de 180 degrés.
