3D Coordinate Systems In Detail
Limelight Camera Space
3d Cartesian Coordinate System with (0,0,0) at the camera lens.
X+ → Pointing to the right (if you were to embody the camera)
Y+ → Pointing downward
Z+ → Pointing out of the camera
Target Space
3d Cartesian Coordinate System with (0,0,0) at the center of the target.
X+ → Pointing to the right of the target (If you are looking at the target)
Y+ → Pointing downward
Z+ → Pointing out of the target (orthogonal to target's plane).
Robot Space
3d Cartesian Coordinate System with (0,0,0) located at the center of the robot’s frame projected down to the floor.
X+ → Pointing forward (Forward Vector)
Y+ → Pointing toward the robot’s right (Right Vector)
Z+ → Pointing upward (Up Vector)
Field Space (FTC)
3d Cartesian Coordinate System with (0,0,0) located at the center of the field
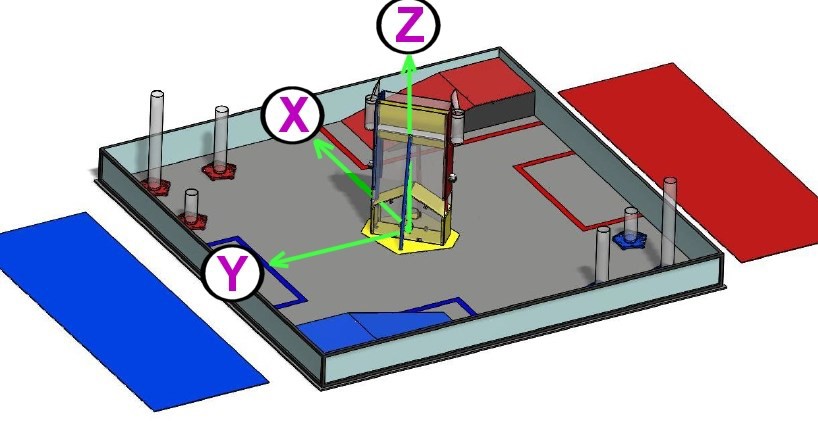
Field Space (FTC Diamond)
3d Cartesian Coordinate System with (0,0,0) located at the center of the field
Field Space (FRC) (Used by map generator)
3d Cartesian Coordinate System with (0,0,0) located at the center of the field
X+ → Points along the long side of the field
Y+ → Points up the short side of the field
Z+ → Points towards the sky
Right-handed. Positive theta results in counterclockwise rotation from positive outside perspective
Field Space (FRC WPIBlue) (Preferred Field Space for all FRC Teams)
Just like the standard FRC coordinate system, but with (0,0,0) at the blue-alliance origin.

Field Space (FRC WPIRed) (Do not use this)
Just like the standard FRC coordinate system, but with (0,0,0) at the red-alliance origin and rotated 180 degrees.
