3D座標系の詳細
Limelightカメラ空間
カメラレンズを(0,0,0)とする3次元デカルト座標系。
X+ → 右方向(カメラの視点から見て)
Y+ → 下方向
Z+ → カメラから外側に向かう方向
ターゲット空間
ターゲットの中心を(0,0,0)とする3次元デカルト座標系。
X+ → ターゲットの右方向(ターゲットを見ている場合)
Y+ → 下方向
Z+ → ターゲットから外側に向かう方向(ターゲット平面に直交)
ロボット空間
ロボットフレームの中心を床に投影した点を(0,0,0)とする3次元デカルト座標系。
X+ → 前方向(前方ベクトル)
Y+ → ロボットの右方向(右ベクトル)
Z+ → 上方向(上ベクトル)
フィールド空間(FTC)
フィールドの中心を(0,0,0)とする3次元デカルト座標系
フィールド空間(FTCダイヤモンド)
フィールドの中心を(0,0,0)とする3次元デカルト座標系
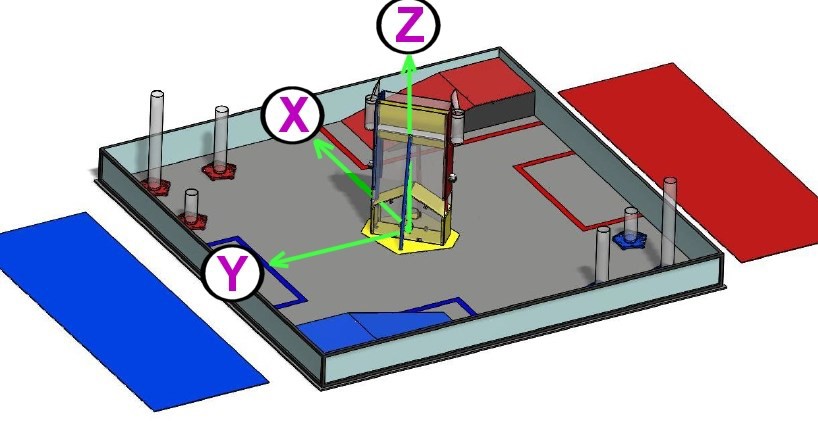
フィールド空間(FRC)(マップジェネレーターで使用)
フィールドの中心を(0,0,0)とする3次元デカルト座標系
X+ → フィールドの長辺に沿った方向
Y+ → フィールドの短辺に沿った上方向
Z+ → 空に向かう方向
右手系。正のシータは外側の正の視点から見て反時計回りの回転
フィールド空間(FRC WPIBlue)(すべてのFRCチームに推奨されるフィールド空間)
標準的なFRC座標系と同じですが、(0,0,0)がブルーアライアンスの原点にあります。

フィールド空間(FRC WPIRed)(使用しないでください)
標準的なFRC座標系と同じですが、(0,0,0)がレッドアライアンスの原点にあり、180度回転しています。
