3D निर्देशांक प्रणालियाँ विस्तार से
Limelight कैमरा स्पेस
3D कार्टेशियन निर्देशांक प्रणाली जिसमें (0,0,0) कैमरा लेंस पर है।
X+ → दाईं ओर इशारा करता है (यदि आप कैमरा बन जाएं)
Y+ → नीचे की ओर इशारा करता है
Z+ → कैमरे से बाहर की ओर इशारा करता है
टारगेट स्पेस
3D कार्टेशियन निर्देशांक प्रणाली जिसमें (0,0,0) टारगेट के केंद्र पर है।
X+ → टारगेट के दाईं ओर इशारा करता है (यदि आप टारगेट को देख रहे हैं)
Y+ → नीचे की ओर इशारा करता है
Z+ → टारगेट से बाहर की ओर इशारा करता है (टारगेट के तल के लंबवत)।
रोबोट स्पेस
3D कार्टेशियन निर्देशांक प्रणाली जिसमें (0,0,0) रोबोट के फ्रेम के केंद्र पर स्थित है जो फर्श पर प्रक्षेपित है।
X+ → आगे की ओर इशारा करता है (फॉरवर्ड वेक्टर)
Y+ → रोबोट के दाईं ओर इशारा करता है (राइट वेक्टर)
Z+ → ऊपर की ओर इशारा करता है (अप वेक्टर)
फील्ड स्पेस (FTC)
3D कार्टेशियन निर्देशांक प्रणाली जिसमें (0,0,0) फील्ड के केंद्र पर स्थित है
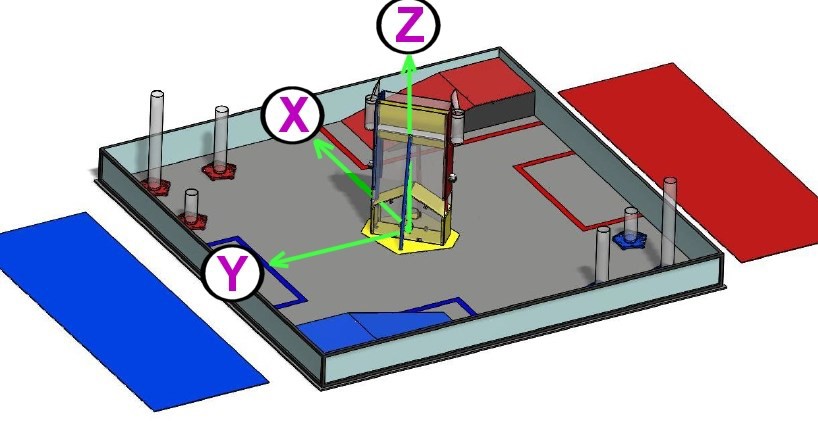
फील्ड स्पेस (FTC डायमंड)
3D कार्टेशियन निर्देशांक प्रणाली जिसमें (0,0,0) फील्ड के केंद्र पर स्थित है
फील्ड स्पेस (FRC) (मैप जनरेटर द्वारा उपयोग किया जाता है)
3D कार्टेशियन निर्देशांक प्रणाली जिसमें (0,0,0) फील्ड के केंद्र पर स्थित है
X+ → फील्ड की लंबी भुजा के साथ इशारा करता है
Y+ → फील्ड की छोटी भुजा के ऊपर इशारा करता है
Z+ → आकाश की ओर इशारा करता है
दाएं हाथ की प्रणाली। धनात्मक थीटा सकारात्मक बाहरी परिप्रेक्ष्य से वामावर्त घूर्णन में परिणाम देता है
फील्ड स्पेस (FRC WPIBlue) (सभी FRC टीमों के लिए पसंदीदा फील्ड स्पेस)
मानक FRC निर्देशांक प्रणाली की तरह, लेकिन (0,0,0) ब्लू-एलायंस मूल बिंदु पर है।

फील्ड स्पेस (FRC WPIRed) (इसका उपयोग न करें)
मानक FRC निर्देशांक प्रणाली की तरह, लेकिन (0,0,0) रेड-एलायंस मूल बिंदु पर है और 180 डिग्री घुमाया गया है।
