3D 坐标系统详解
Limelight 相机空间
以相机镜头为原点 (0,0,0) 的三维笛卡尔坐标系。
X+ → 指向右侧(如果你站在相机的视角)
Y+ → 指向下方
Z+ → 指向相机前方
目标空间
以目标中心为原点 (0,0,0) 的三维笛卡尔坐标系。
X+ → 指向目标的右侧(当你面对目标时)
Y+ → 指向下方
Z+ → 指向目标外侧(垂直于目标平面)
机器人空间
以机器人底盘中心投影到地面的点为原点 (0,0,0) 的三维笛卡尔坐标系。
X+ → 指向前方(前向向量)
Y+ → 指向机器人右侧(右向向量)
Z+ → 指向上方(上向向量)
场地空间 (FTC)
以场地中心为原点 (0,0,0) 的三维笛卡尔坐标系
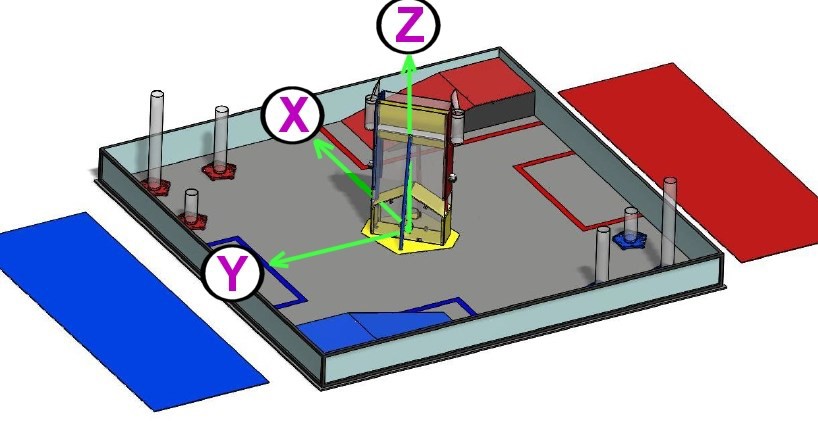
场地空间 (FTC 菱形)
以场地中心为原点 (0,0,0) 的三维笛卡尔坐标系
场地空间 (FRC)(地图生成器使用)
以场地中心为原点 (0,0,0) 的三维笛卡尔坐标系
X+ → 指向场地长边方向
Y+ → 指向场地短边方向
Z+ → 指向天空
右手坐标系。从正外侧视角看,正角度导致逆时针旋转
场地空间 (FRC WPIBlue)(所有 FRC 队伍推荐使用的场地空间)
与标准 FRC 坐标系相同,但原点 (0,0,0) 位于蓝色联盟原点。

场地空间 (FRC WPIRed)(请勿使用)
与标准 FRC 坐标系相同,但原点 (0,0,0) 位于红色联盟原点并旋转 180 度。
