Sistemas de Coordenadas 3D em Detalhe
Espaço da Câmera Limelight
Sistema de Coordenadas Cartesianas 3D com (0,0,0) na lente da câmera.
X+ → Apontando para a direita (se você incorporasse a câmera)
Y+ → Apontando para baixo
Z+ → Apontando para fora da câmera
Espaço do Alvo
Sistema de Coordenadas Cartesianas 3D com (0,0,0) no centro do alvo.
X+ → Apontando para a direita do alvo (se você estiver olhando para o alvo)
Y+ → Apontando para baixo
Z+ → Apontando para fora do alvo (ortogonal ao plano do alvo).
Espaço do Robô
Sistema de Coordenadas Cartesianas 3D com (0,0,0) localizado no centro da estrutura do robô projetado no chão.
X+ → Apontando para frente (Vetor Frontal)
Y+ → Apontando para a direita do robô (Vetor Direito)
Z+ → Apontando para cima (Vetor Superior)
Espaço do Campo (FTC)
Sistema de Coordenadas Cartesianas 3D com (0,0,0) localizado no centro do campo
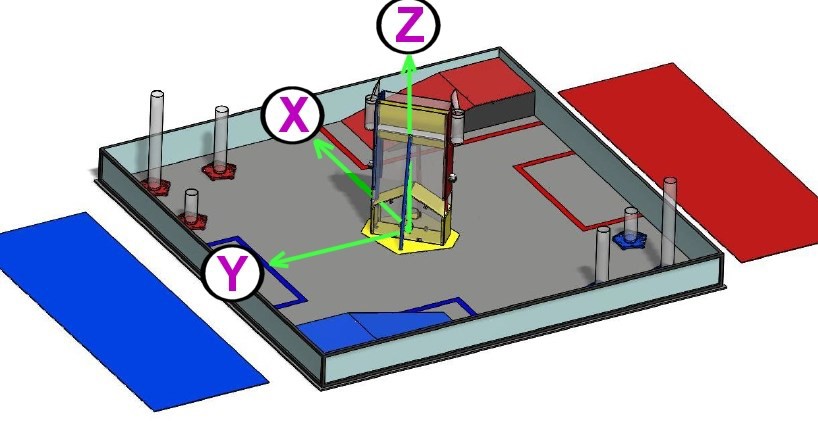
Espaço do Campo (FTC Diamante)
Sistema de Coordenadas Cartesianas 3D com (0,0,0) localizado no centro do campo
Espaço do Campo (FRC) (Usado pelo gerador de mapas)
Sistema de Coordenadas Cartesianas 3D com (0,0,0) localizado no centro do campo
X+ → Aponta ao longo do lado maior do campo
Y+ → Aponta ao longo do lado menor do campo
Z+ → Aponta em direção ao céu
Mão direita. Theta positivo resulta em rotação anti-horária da perspectiva externa positiva
Espaço do Campo (FRC WPIBlue) (Espaço de Campo Preferido para todas as Equipes FRC)
Igual ao sistema de coordenadas FRC padrão, mas com (0,0,0) na origem da aliança azul.

Espaço do Campo (FRC WPIRed) (Não use este)
Igual ao sistema de coordenadas FRC padrão, mas com (0,0,0) na origem da aliança vermelha e rotacionado 180 graus.
