מדריך מהיר לתכנות FRC
Limelight תומכת בפרוטו�קולי REST/HTTP, Websocket, Modbus ו-NetworkTables עבור נתוני מעקב, נתוני סטטוס ותצורה חיה. פורמטי JSON ופלט גולמי זמינים. ראה את חלק ה-APIs במסמכים למידע נוסף.
עבור קבוצות FRC, הפרוטוקול המומלץ הוא NetworkTables. Limelight מפרסמת את כל נתוני המעקב, כולל dump מלא של JSON, ל-NetworkTables ב-100hz. קבוצות יכולות גם להגדיר בקרות כמו ledMode, חלון חיתוך ועוד באמצעות NetworkTables. קבוצות FRC יכולות להשתמש בספריות Limelight Lib Java ו-C++ כדי להתחיל עם Limelight תוך שניות. Limelight Lib היא הדרך הקלה ביותר להתחיל
LimelightLib:
- Java
- C++
- Python
double tx = LimelightHelpers.getTX("");
#include "LimelightHelpers.h"
double tx = LimelightHelpers::getTX("");
double ty = LimelightHelpers::getTY("");
wip
אם ברצונכם לדלג על LimelightLib ולעבור ישירות לתכנות עם NetworkTables:
- Java
- C++
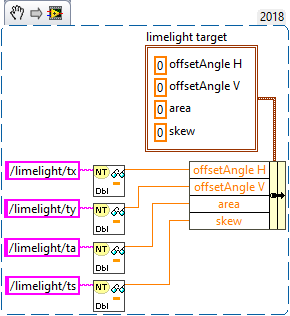
- LabView
- Python
import edu.wpi.first.wpilibj.smartdashboard.SmartDashboard;
import edu.wpi.first.networktables.NetworkTable;
import edu.wpi.first.networktables.NetworkTableEntry;
import edu.wpi.first.networktables.NetworkTableInstance;
NetworkTable table = NetworkTableInstance.getDefault().getTable("limelight");
NetworkTableEntry tx = table.getEntry("tx");
NetworkTableEntry ty = table.getEntry("ty");
NetworkTableEntry ta = table.getEntry("ta");
//קריאת ערכים באופן תקופתי
double x = tx.getDouble(0.0);
double y = ty.getDouble(0.0);
double area = ta.getDouble(0.0);
//פרסום ל-smart dashboard באופן תקופתי
SmartDashboard.putNumber("LimelightX", x);
SmartDashboard.putNumber("LimelightY", y);
SmartDashboard.putNumber("LimelightArea", area);
#include "frc/smartdashboard/Smartdashboard.h"
#include "networktables/NetworkTable.h"
#include "networktables/NetworkTableInstance.h"
#include "networktables/NetworkTableEntry.h"
#include "networktables/NetworkTableValue.h"
#include "wpi/span.h"
std::shared_ptr<nt::NetworkTable> table = nt::NetworkTableInstance::GetDefault().GetTable("limelight");
double targetOffsetAngle_Horizontal = table->GetNumber("tx",0.0);
double targetOffsetAngle_Vertical = table->GetNumber("ty",0.0);
double targetArea = table->GetNumber("ta",0.0);
double targetSkew = table->GetNumber("ts",0.0);
import cv2
import numpy as np
# runPipeline() נקרא בכל פריים על ידי המערכת האחורית של Limelight
def runPipeline(image, llrobot):
# המרת תמונת הקלט למרחב צבעים HSV
img_hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
# המרת ה-HSV לתמונה בינארית על ידי הסרת פיקסלים
# שאינם נופלים בטווח ערכי HSV Min/Max הבאים
img_threshold = cv2.inRange(img_hsv, (60, 70, 70), (85, 255, 255))
# מציאת קונטורים בתמונה הבינארית החדשה
contours, _ = cv2.findContours(img_threshold,
cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
largestContour = np.array([[]])
# אתחול מערך ריק של ערכים לשליחה בחזרה לרובוט
llpython = [0,0,0,0,0,0,0,0]
# אם זוהו קונטורים, צייר אותם
if len(contours) > 0:
cv2.drawContours(image, contours, -1, 255, 2)
# רישום הקונטור הגדול ביותר
largestContour = max(contours, key=cv2.contourArea)
# קבלת תיבת גבול לא מסובבת שמקיפה את הקונטור
x,y,w,h = cv2.boundingRect(largestContour)
# ציור תיבת הגבול הלא מסובבת
cv2.rectangle(image,(x,y),(x+w,y+h),(0,255,255),2)
# רישום נתונים מותאמים אישית לשליחה בחזרה לרובוט
llpython = [1,x,y,w,h,9,8,7]
# החזרת הקונטור הגדול ביותר עבור כוונת LL, התמונה המשונה, ונתוני רובוט מותאמים אישית
return largestContour, image, llpython