FRC Programming Quick Start
Limelight supports the REST/HTTP, Websocket, Modbus, and NetworkTables protocols for targeting data, status data and live configuration. JSON and raw output formats are available. See the APIs secion of the docs for more information.
For FRC Teams, the recommended protocol is NetworkTables . Limelight posts all targeting data, including a full JSON dump, to NetworkTables at 100hz. Teams can also set controls such as the ledMode, crop window, and more via NetworkTables. FRC teams may use the Limelight Lib Java and C++ libraries to get started with Limelight in seconds. Limelight Lib is the easiest way to get started
LimelightLib:
- Java
- C++
- Python
double tx = LimelightHelpers.getTX("");
#include "LimelightHelpers.h"
double tx = LimelightHelpers::getTX("");
double ty = LimelightHelpers::getTY("");
wip
If you want to skip LimelightLib and jump right into programming with NetworkTables:
- Java
- C++
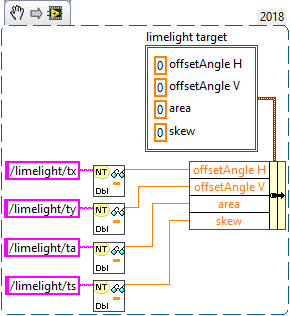
- LabView
- Python
import edu.wpi.first.wpilibj.smartdashboard.SmartDashboard;
import edu.wpi.first.networktables.NetworkTable;
import edu.wpi.first.networktables.NetworkTableEntry;
import edu.wpi.first.networktables.NetworkTableInstance;
NetworkTable table = NetworkTableInstance.getDefault().getTable("limelight");
NetworkTableEntry tx = table.getEntry("tx");
NetworkTableEntry ty = table.getEntry("ty");
NetworkTableEntry ta = table.getEntry("ta");
//read values periodically
double x = tx.getDouble(0.0);
double y = ty.getDouble(0.0);
double area = ta.getDouble(0.0);
//post to smart dashboard periodically
SmartDashboard.putNumber("LimelightX", x);
SmartDashboard.putNumber("LimelightY", y);
SmartDashboard.putNumber("LimelightArea", area);
#include "frc/smartdashboard/Smartdashboard.h"
#include "networktables/NetworkTable.h"
#include "networktables/NetworkTableInstance.h"
#include "networktables/NetworkTableEntry.h"
#include "networktables/NetworkTableValue.h"
#include "wpi/span.h"
std::shared_ptr<nt::NetworkTable> table = nt::NetworkTableInstance::GetDefault().GetTable("limelight");
double targetOffsetAngle_Horizontal = table->GetNumber("tx",0.0);
double targetOffsetAngle_Vertical = table->GetNumber("ty",0.0);
double targetArea = table->GetNumber("ta",0.0);
double targetSkew = table->GetNumber("ts",0.0);
import cv2
import numpy as np
# runPipeline() is called every frame by Limelight's backend.
def runPipeline(image, llrobot):
# convert the input image to the HSV color space
img_hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
# convert the hsv to a binary image by removing any pixels
# that do not fall within the following HSV Min/Max values
img_threshold = cv2.inRange(img_hsv, (60, 70, 70), (85, 255, 255))
# find contours in the new binary image
contours, _ = cv2.findContours(img_threshold,
cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
largestContour = np.array([[]])
# initialize an empty array of values to send back to the robot
llpython = [0,0,0,0,0,0,0,0]
# if contours have been detected, draw them
if len(contours) > 0:
cv2.drawContours(image, contours, -1, 255, 2)
# record the largest contour
largestContour = max(contours, key=cv2.contourArea)
# get the unrotated bounding box that surrounds the contour
x,y,w,h = cv2.boundingRect(largestContour)
# draw the unrotated bounding box
cv2.rectangle(image,(x,y),(x+w,y+h),(0,255,255),2)
# record some custom data to send back to the robot
llpython = [1,x,y,w,h,9,8,7]
#return the largest contour for the LL crosshair, the modified image, and custom robot data
return largestContour, image, llpython