Limelight 1 クイックスタート

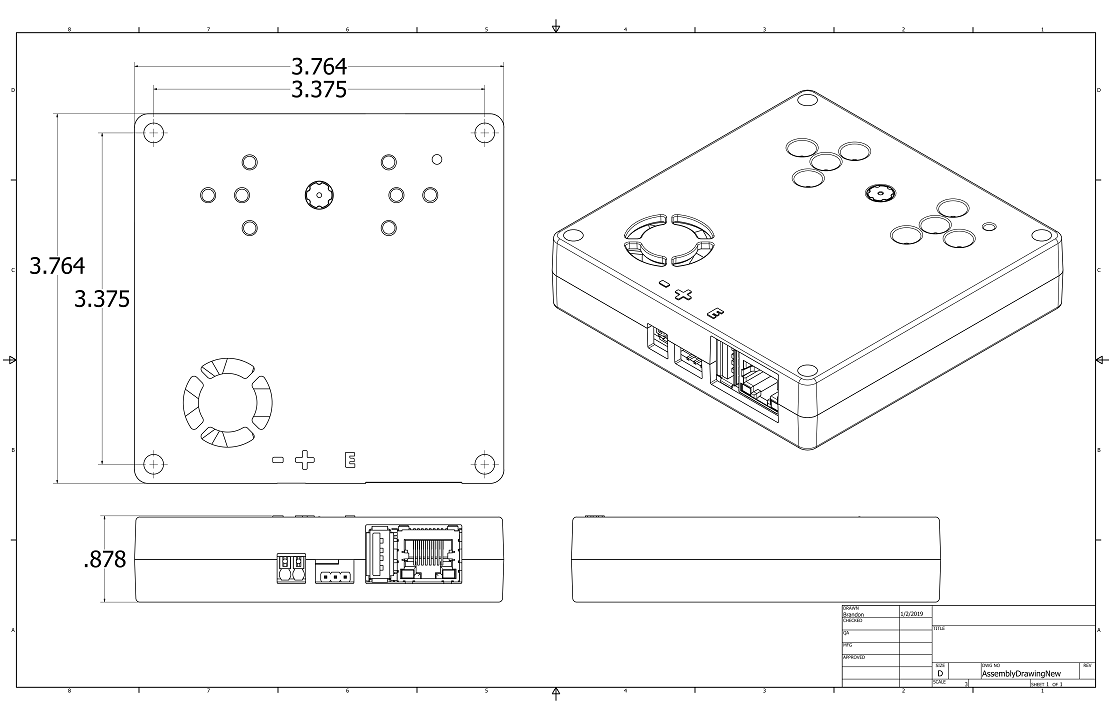
ハードウェア仕様
- フットプリント: 3.764in x 3.764in (95.67mm x 95.67mm)
- 厚さ: 0.878in (22.30mm)
- #10 / M4 貫通穴マウント
- 電源入力: 4.1V-16V
- 最大消費電力 10W
- LED照明: 400ルーメン、緑色照明
- センサー: OV5647 カラーローリングシャッター (320x240 @ 90FPS)
- 交換可能なM12レンズ
- 黒色耐衝撃ポリカーボネート筐体
- 10/100 イーサネット RJ45ポート
- RS-232 シリアル (3.3V)
- USB-A ホストポート (USB 2.0)
- ステータスライト: 緑(ターゲット検出)、黄(ネットワーク状態)
- Google Coral USB ニューラルネットワークアクセラレータ対応
ソフトウェア機能 (Limelight OS)
- プラグアンドプレイの高性能ビジョン。経験不要。
- ビジョンパイプライン設定用のセルフホスト型ブラウザベースUI
- REST/HTTP、Websocket、NetworkTables、ModbusTCP、ROS対応
- 設定可能な固定露出、センサーゲイン、解像度、フレームレート
- 10個のホットスワップ可能なビジョンパイプラインを設定:
- OpenCV 4.10、numpyなどを使用したカスタムPythonパイプライン
- 2D、3D AprilTagトラッキングとロボットローカライゼーション
- MegaTag1によるフル3Dローカライゼーション(ロボットGPS)
- MegaTag2による外部IMU融合を使用した高精度フル3Dローカライゼーション(ロボットGPS)
- Webインターフェースでのフル3Dビジュアライザー
- 90FPS カラーブロブパイプライン
- ニューラル物体検出パイプライン
- ニューラル画像分類パイプライン
- バーコードトラッキングパイプライン
- 低遅延ストリーミング用ビューファインダーパイプライン
- 内蔵の低遅延MJPEGストリーミング。設定可能なストリーム方向
1. Limelight 1の取り付け
貫通穴マウント
- 1 1/4" #10-32 または #10-24 ネジとナイロックナットを使用
- または、38mm M4ボルトとナイロックナットを使用
- 筐体の仕上げを保護するためにプラスチックワッシャーを使用
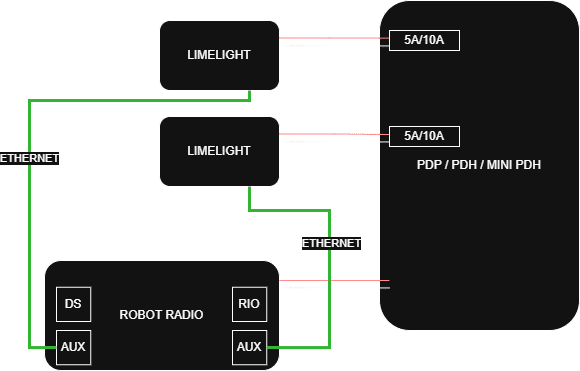
2. Limelight 1の配線
電源
- LimelightからPDP/PDHのスロットまで18-20AWGワイヤーを2本配線
- 同じスロットに5Aブレーカーを追加
- (必須ではない)最適な結果を得るためにWeidmullerフェルールを使用(写真は20AWGワイヤーとWeidmuller 20AWGオレンジフェルール)
- フェルール:
- 低コストフェルール圧着工具:

イーサネット
- Limelightからロボットラジオまでイーサネットケーブルを配線
- より線(理想的には20AWG)のツイストCat6ケーブルを使用
- イーサネットケーブルにストレインリリーフを追加
3. Webインターフェースへのアクセス
Limelight 1をネットワークに接�続した後:
- ロボットの電源を入れ、ラップトップをロボットのネットワークに接続
- 以下のいずれかの方法でWebインターフェースにアクセス:
- 方法1: Limelight Hardware Managerアプリケーションを開き、Limelightをスキャンし、表示されたLimelightをダブルクリック
- 方法2: Webブラウザを開き、
http://limelight.local:5801に移動 - 方法3: Webブラウザを開き、Limelightの静的IPアドレスにポート5801を付けて移動(設定済みの場合)
接続すると、以下にアクセスできます:
- 設定タブ - チーム番号、ホスト名、その他のシステム設定を構成
- ビジョンパイプラインタブ - ビジョン処理パイプラインの設定と調整
- カメラ&クロスヘアタブ - カメラ設定とクロスヘアパラメータの調整
すべての設定はこのWebインターフェースを通じて行います。変更はLimelightに自動的に保存されます。
4. LimelightOSのアップデート
注意
一部のLimelight 1はmicro-USBポート周辺が静電気に敏感です。ポートの損傷を防ぐため、micro-USBポートに接続する前に金属製のものに触れて自分自身をアースしてください。これにより、体に帯電した静電気が放電されます。
注意
アップグレード前にパイプラインとスクリプトをバックアップしてください - このプロセス中に消去されます!
- Limelightの電源を切る
- 最新のUSBドライバー、Limelight OSイメージ、Balena Flashツールをダウンロード
- ラップトップからLimelightまでUSB->MicroUSBケーブルを接続
- Limelightの電源を入れる
- 「Balena Etcher」を管理者として実行
- マシンがカメラを認識するまで最大20秒かかる場合があります
- ダウンロードフォルダ内の最新の.zipイメージを選択
- 「Drives」メニューで「Compute Module」デバイスを選択
- 「Flash」をクリック
- フラッシュが完了したら、Limelightから電源を取り外す
備考
イメージング中のみmicro-USBケーブルを接続してください。LimelightはmicroUSBケーブルが接続されている間、特別なフラッシュモードに入ります。Limelightがフラッシュモードの間はWebインターフェースにアクセスできません。
5. ネットワーク設定
チーム番号の設定(FRC / Networktablesに必須)
- ロボットの電源を入れ、ラップトップをロボットのネットワークに接続
- Limelight Hardware Managerを開き、Limelightをスキャンし、表示されたエントリをダブルクリック
- または、http://limelight.local:5801に移動
- 「Settings」タブに移動
- チーム番号を入力し、「Update Team Number」を押す
一意のホスト名の設定(複数のLimelightを使用するFRC / Networktablesシステムにのみ必要)
- 複数のLimelightを使用する場合、各Limelightには一意のホスト名が必要です
- 設定タブでホスト名を設定し、「set hostname」ボタンをクリック
静的IPの設定(推奨、必須ではない)
- 「IP Assignment」を「Static」に変更
- IPアドレスを「10.TE.AM.11」に設定
- チーム916は10.9.16.xxを使用
- チーム9106は10.91.6.xxを使用
- チーム9016は10.90.16.xxを使用
- ネットマスクを「255.255.255.0」に設定
- ゲートウェイを「10.TE.AM.1」に設定
- 「Update」をクリック
- ロボットの電源を入れ直す
- 10.TE.AM.11:5801で設定パネルに、10.TE.AM.11:5800でカメラストリームにアクセス
- 複数のLimelightを使用する場合、各Limelightに一意の静的IPアドレスを割り当てる
Q. なぜ静的IPアドレスの使用を推奨するのですか?
A. Limelightの起動時間を数秒短縮できます。 また、チームは歴史的に実際のFRCフィールドやイベントラジオファームウェアで DHCP割り当てやmDNSレスポンダーに問題を抱えてきました。
robo-rioとドライバーステーションにも静的IPアドレスを設定することをお勧めします。 これらすべてのデバイスで使用するネットワーク設定は、 このWebページの下半分付近に記載されています。
6. LEDの制御
Limelight 1には緑色照明LEDが内蔵されています。これらのLEDは以下の方法で制御できます:
Webインターフェース経由
- Webインターフェースのカメラ&クロスヘアタブに移動
- LEDモードドロップダウンを使用して選択:
- On - 常時点灯
- Off - 常時消灯
- Blink - LEDを点滅
- Pipeline - ターゲット検出時にLEDが点灯
NetworkTablesまたはAPI経由
- 「ledMode」値を設定:
- 0: パイプラインデフォルト
- 1: 強制オフ
- 2: 強制点滅
- 3: 強制オン
7. トラブルシューティング
ステータスライトインジケーター
- 緑色ライト: ゆっくり点滅(ターゲットなし)、速く点滅(ターゲット検出)
- 黄色ライト: 点滅(静的IPなし)、点灯(静的IP割り当て済み)
LED診断パターン
- 左右または上下の交互点滅: 内部カメラケーブルが外れているか、イメージセンサーが損傷しています
- 高速点滅(全LED): ネッ�トワークリセットボタンが10秒以上押されています
- 起動シーケンスの繰り返し: ハードウェア損傷によりソフトウェアがクラッシュしている可能性があります
limelight.local:5801が機能しない場合
- Bonjourがインストールされているか確認(Windows: プログラムの追加と削除)
- Bonjourの項目が2つある場合は「bonjour print services」をアンインストール
- 見つからない場合はダウンロードページからBonjourをインストール
IPアドレスのリセット
- Limelightが起動した後、設定ボタンを10秒間押し続ける
- 次回起動時にネットワーク設定が動的アドレス指定にリセットされます