2019 Deep Space 机器人
2019 FRC 比赛 Deep Space 在许多目标上方都有视觉标靶。 下面您可以找到 Java 和 Labview 的完整示例程序,这些程序实现了一种简单的方法来自动驾驶机器人朝向 Deep Space 中的目标。
这些是非常简单的程序,仅用于展示使用 limelight 跟踪数据来控制机器人的概念。 在每个程序中,您可以使用游戏手柄驾驶机器人。 如果您按住 'A' 按钮,并且 limelight 看到有效目标(取决于您管道中的设置),那么机器人将自动驾驶朝向目标。 请注意为您的特定机器人调整代码中的各种常量。 有些机器人比其他机器人更容易转向或驾驶,因此必须根据具体情况调整比例控制常量。 在启用 limelight 寻找行为之前,请确保机器人使用游戏手柄控制器正确驾驶。
- Java
- LabView
package frc.robot;
import edu.wpi.first.wpilibj.TimedRobot;
import edu.wpi.first.wpilibj.smartdashboard.SendableChooser;
import edu.wpi.first.wpilibj.smartdashboard.SmartDashboard;
import edu.wpi.first.wpilibj.VictorSP;
import edu.wpi.first.wpilibj.SpeedControllerGroup;
import edu.wpi.first.wpilibj.XboxController;
import edu.wpi.first.wpilibj.GenericHID.Hand;
import edu.wpi.first.wpilibj.drive.DifferentialDrive;
import edu.wpi.first.networktables.*;
public class Robot extends TimedRobot {
private static final String kDefaultAuto = "Default";
private static final String kCustomAuto = "My Auto";
private String m_autoSelected;
private final SendableChooser<String> m_chooser = new SendableChooser<>();
private VictorSP m_Left0 = new VictorSP(0);
private VictorSP m_Left1 = new VictorSP(1);
private VictorSP m_Right0 = new VictorSP(2);
private VictorSP m_Right1 = new VictorSP(3);
private SpeedControllerGroup m_LeftMotors = new SpeedControllerGroup(m_Left0,m_Left1);
private SpeedControllerGroup m_RightMotors = new SpeedControllerGroup(m_Right0,m_Right1);
private DifferentialDrive m_Drive = new DifferentialDrive(m_LeftMotors,m_RightMotors);
private XboxController m_Controller = new XboxController(0);
private boolean m_LimelightHasValidTarget = false;
private double m_LimelightDriveCommand = 0.0;
private double m_LimelightSteerCommand = 0.0;
@Override
public void robotInit() {
m_chooser.setDefaultOption("Default Auto", kDefaultAuto);
m_chooser.addOption("My Auto", kCustomAuto);
SmartDashboard.putData("Auto choices", m_chooser);
}
@Override
public void robotPeriodic() {
}
@Override
public void autonomousInit() {
m_autoSelected = m_chooser.getSelected();
}
@Override
public void autonomousPeriodic() {
}
@Override
public void teleopPeriodic() {
Update_Limelight_Tracking();
double steer = m_Controller.getX(Hand.kRight);
double drive = -m_Controller.getY(Hand.kLeft);
boolean auto = m_Controller.getAButton();
steer *= 0.70;
drive *= 0.70;
if (auto)
{
if (m_LimelightHasValidTarget)
{
m_Drive.arcadeDrive(m_LimelightDriveCommand,m_LimelightSteerCommand);
}
else
{
m_Drive.arcadeDrive(0.0,0.0);
}
}
else
{
m_Drive.arcadeDrive(drive,steer);
}
}
@Override
public void testPeriodic() {
}
/**
* 此函数实现了一种简单的方法,根据 limelight 相机的跟踪数据生成驾驶和转向命令。
*/
public void Update_Limelight_Tracking()
{
// 这些数字必须针对您的机器人进行调整!请小心!
final double STEER_K = 0.03; // 朝向目标转向的力度
final double DRIVE_K = 0.26; // 朝向目标前进的力度
final double DESIRED_TARGET_AREA = 13.0; // 机器人到达墙壁时目标的面积
final double MAX_DRIVE = 0.7; // 简单的速度限制,防止驾驶过快
double tv = NetworkTableInstance.getDefault().getTable("limelight").getEntry("tv").getDouble(0);
double tx = NetworkTableInstance.getDefault().getTable("limelight").getEntry("tx").getDouble(0);
double ty = NetworkTableInstance.getDefault().getTable("limelight").getEntry("ty").getDouble(0);
double ta = NetworkTableInstance.getDefault().getTable("limelight").getEntry("ta").getDouble(0);
if (tv < 1.0)
{
m_LimelightHasValidTarget = false;
m_LimelightDriveCommand = 0.0;
m_LimelightSteerCommand = 0.0;
return;
}
m_LimelightHasValidTarget = true;
// 从比例转向开始
double steer_cmd = tx * STEER_K;
m_LimelightSteerCommand = steer_cmd;
// 尝试向前驾驶直到目标面积达到我们期望的面积
double drive_cmd = (DESIRED_TARGET_AREA - ta) * DRIVE_K;
// 不要让机器人太快地驶入目标
if (drive_cmd > MAX_DRIVE)
{
drive_cmd = MAX_DRIVE;
}
m_LimelightDriveCommand = drive_cmd;
}
}
这是一个 LabView VI 的框图,它从 Limelight 读取跟踪数据并生成驾驶和转向命令。这张图片是一个"LabView 代码片段"。 只需将图片文件保存到您的计算机,然后将其拖入 labview VI 中,框图就会被重现。
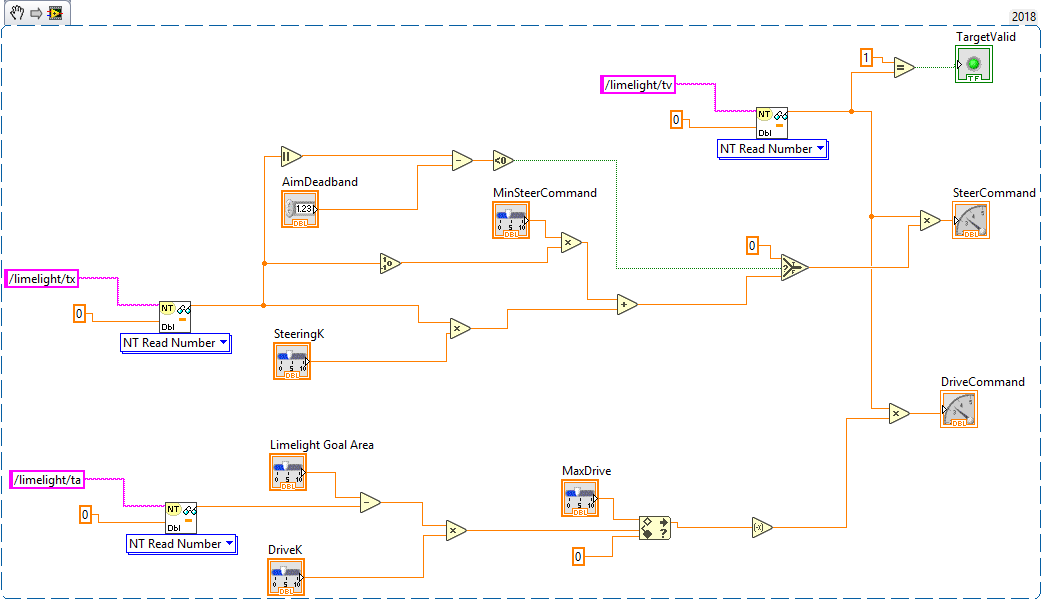
您也可以从此链接下载完整的 labview 源代码