2019 Deep Space रोबोट
2019 FRC गेम Deep Space में कई गोल्स के ऊपर विज़न टारगेट थे। नीचे आप Java और Labview में पूर्ण उदाहरण प्रोग्राम पा सकते हैं जो Deep Space में गोल की ओर स्वचालित रूप से ड्राइव करने की एक सरल विधि को लागू करते हैं।
ये बहुत सरल प्रोग्राम हैं और केवल आपके रोबोट को नियंत्रित करने के लिए limelight ट्रैकिंग डेटा का उपयोग करने की अवधारणा दिखाने के लिए हैं। प्रत्येक प्रोग्राम में, आप गेमपैड से अपने रोबोट को ड्राइव कर सकते हैं। यदि आप 'A' बटन दबाए रखते हैं, और limelight एक वैध टारगेट देखता है (आपकी पाइपलाइन में सेटिंग्स के आधार पर) तो रोबोट स्वचालित रूप से टारगेट की ओर ड्राइव करेगा। अपने विशेष रोबोट के लिए कोड में विभिन्न constants को ट्यून करने में सावधानी बरतें। कुछ रोबोट दूसरों की तुलना में अधिक आसानी से मुड़ते या चलते हैं, इसलिए proportional control constants को केस-बाय-केस आधार पर ट्यून किया जाना चाहिए। limelight seeking व्यवहार को सक्षम करने से पहले सुनिश्चित करें कि रोबोट गेमपैड कंट्रोलर का उपयोग करके सही ढंग से ड्राइव करता है।
- Java
- LabView
package frc.robot;
import edu.wpi.first.wpilibj.TimedRobot;
import edu.wpi.first.wpilibj.smartdashboard.SendableChooser;
import edu.wpi.first.wpilibj.smartdashboard.SmartDashboard;
import edu.wpi.first.wpilibj.VictorSP;
import edu.wpi.first.wpilibj.SpeedControllerGroup;
import edu.wpi.first.wpilibj.XboxController;
import edu.wpi.first.wpilibj.GenericHID.Hand;
import edu.wpi.first.wpilibj.drive.DifferentialDrive;
import edu.wpi.first.networktables.*;
public class Robot extends TimedRobot {
private static final String kDefaultAuto = "Default";
private static final String kCustomAuto = "My Auto";
private String m_autoSelected;
private final SendableChooser<String> m_chooser = new SendableChooser<>();
private VictorSP m_Left0 = new VictorSP(0);
private VictorSP m_Left1 = new VictorSP(1);
private VictorSP m_Right0 = new VictorSP(2);
private VictorSP m_Right1 = new VictorSP(3);
private SpeedControllerGroup m_LeftMotors = new SpeedControllerGroup(m_Left0,m_Left1);
private SpeedControllerGroup m_RightMotors = new SpeedControllerGroup(m_Right0,m_Right1);
private DifferentialDrive m_Drive = new DifferentialDrive(m_LeftMotors,m_RightMotors);
private XboxController m_Controller = new XboxController(0);
private boolean m_LimelightHasValidTarget = false;
private double m_LimelightDriveCommand = 0.0;
private double m_LimelightSteerCommand = 0.0;
@Override
public void robotInit() {
m_chooser.setDefaultOption("Default Auto", kDefaultAuto);
m_chooser.addOption("My Auto", kCustomAuto);
SmartDashboard.putData("Auto choices", m_chooser);
}
@Override
public void robotPeriodic() {
}
@Override
public void autonomousInit() {
m_autoSelected = m_chooser.getSelected();
}
@Override
public void autonomousPeriodic() {
}
@Override
public void teleopPeriodic() {
Update_Limelight_Tracking();
double steer = m_Controller.getX(Hand.kRight);
double drive = -m_Controller.getY(Hand.kLeft);
boolean auto = m_Controller.getAButton();
steer *= 0.70;
drive *= 0.70;
if (auto)
{
if (m_LimelightHasValidTarget)
{
m_Drive.arcadeDrive(m_LimelightDriveCommand,m_LimelightSteerCommand);
}
else
{
m_Drive.arcadeDrive(0.0,0.0);
}
}
else
{
m_Drive.arcadeDrive(drive,steer);
}
}
@Override
public void testPeriodic() {
}
/**
* यह फ़ंक्शन limelight कैमरे से ट्रैकिंग डेटा के आधार पर ड्राइविंग और स्टीयरिंग कमांड
* जनरेट करने की एक सरल विधि को लागू करता है।
*/
public void Update_Limelight_Tracking()
{
// इन नंबरों को आपके रोबोट के लिए ट्यून किया जाना चाहिए! सावधान रहें!
final double STEER_K = 0.03; // टारगेट की ओर कितना तेज़ मुड़ना है
final double DRIVE_K = 0.26; // टारगेट की ओर कितना तेज़ आगे बढ़ना है
final double DESIRED_TARGET_AREA = 13.0; // जब रोबोट दीवार तक पहुंचता है तब टारगेट का क्षेत्रफल
final double MAX_DRIVE = 0.7; // सरल स्पीड लिमिट ताकि हम बहुत तेज़ न चलें
double tv = NetworkTableInstance.getDefault().getTable("limelight").getEntry("tv").getDouble(0);
double tx = NetworkTableInstance.getDefault().getTable("limelight").getEntry("tx").getDouble(0);
double ty = NetworkTableInstance.getDefault().getTable("limelight").getEntry("ty").getDouble(0);
double ta = NetworkTableInstance.getDefault().getTable("limelight").getEntry("ta").getDouble(0);
if (tv < 1.0)
{
m_LimelightHasValidTarget = false;
m_LimelightDriveCommand = 0.0;
m_LimelightSteerCommand = 0.0;
return;
}
m_LimelightHasValidTarget = true;
// proportional स्टीयरिंग से शुरू करें
double steer_cmd = tx * STEER_K;
m_LimelightSteerCommand = steer_cmd;
// जब तक टारगेट एरिया हमारे desired एरिया तक नहीं पहुंच जाता तब तक आगे बढ़ने की कोशिश करें
double drive_cmd = (DESIRED_TARGET_AREA - ta) * DRIVE_K;
// रोबोट को गोल में बहुत तेज़ी से न जाने दें
if (drive_cmd > MAX_DRIVE)
{
drive_cmd = MAX_DRIVE;
}
m_LimelightDriveCommand = drive_cmd;
}
}
यहां एक LabView VI के लिए ब्लॉक डायग्राम है जो Limelight से ट्रैकिंग डेटा पढ़ता है और ड्राइव और स्टीयर कमांड जनरेट करता है। यह इमेज एक "LabView Snippet" है। बस इमेज फ़ाइल को अपने कंप्यूटर पर सेव करें और फिर इसे labview VI में ड्रैग करें और ब्लॉक डायग्राम पुन: उत्पन्न हो जाएगा।
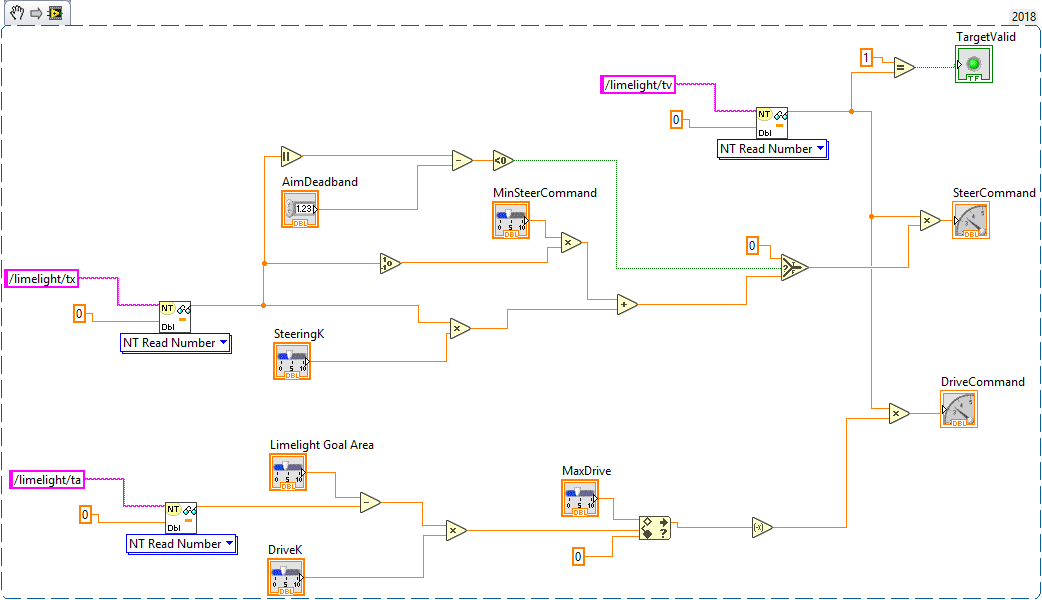
आप पूरा labview सोर्स कोड इस लिंक से भी डाउनलोड कर सकते हैं