Robot Deep Space 2019
Le jeu FRC 2019 Deep Space comportait des cibles de vision au-dessus de nombreux objectifs. Ci-dessous, vous trouverez des exemples de programmes complets en Java et LabView qui implémentent une méthode simple pour conduire automatiquement vers un objectif dans Deep Space.
Ce sont des programmes très simples et uniquement destinés à montrer le concept d'utilisation des données de suivi limelight pour contrôler votre robot. Dans chaque programme, vous pouvez conduire votre robot avec une manette de jeu. Si vous maintenez le bouton 'A' enfoncé, et que la limelight voit une cible valide (selon les paramètres de votre pipeline), alors le robot se dirigera automatiquement vers la cible. Faites attention à ajuster les différentes constantes dans le code pour votre robot particulier. Certains robots tournent ou avancent plus facilement que d'autres, donc l'ajustement des constantes de contrôle proportionnel doit être fait au cas par cas. Assurez-vous que le robot se déplace correctement avec la manette de jeu avant d'activer le comportement de recherche limelight.
- Java
- LabView
package frc.robot;
import edu.wpi.first.wpilibj.TimedRobot;
import edu.wpi.first.wpilibj.smartdashboard.SendableChooser;
import edu.wpi.first.wpilibj.smartdashboard.SmartDashboard;
import edu.wpi.first.wpilibj.VictorSP;
import edu.wpi.first.wpilibj.SpeedControllerGroup;
import edu.wpi.first.wpilibj.XboxController;
import edu.wpi.first.wpilibj.GenericHID.Hand;
import edu.wpi.first.wpilibj.drive.DifferentialDrive;
import edu.wpi.first.networktables.*;
public class Robot extends TimedRobot {
private static final String kDefaultAuto = "Default";
private static final String kCustomAuto = "My Auto";
private String m_autoSelected;
private final SendableChooser<String> m_chooser = new SendableChooser<>();
private VictorSP m_Left0 = new VictorSP(0);
private VictorSP m_Left1 = new VictorSP(1);
private VictorSP m_Right0 = new VictorSP(2);
private VictorSP m_Right1 = new VictorSP(3);
private SpeedControllerGroup m_LeftMotors = new SpeedControllerGroup(m_Left0,m_Left1);
private SpeedControllerGroup m_RightMotors = new SpeedControllerGroup(m_Right0,m_Right1);
private DifferentialDrive m_Drive = new DifferentialDrive(m_LeftMotors,m_RightMotors);
private XboxController m_Controller = new XboxController(0);
private boolean m_LimelightHasValidTarget = false;
private double m_LimelightDriveCommand = 0.0;
private double m_LimelightSteerCommand = 0.0;
@Override
public void robotInit() {
m_chooser.setDefaultOption("Default Auto", kDefaultAuto);
m_chooser.addOption("My Auto", kCustomAuto);
SmartDashboard.putData("Auto choices", m_chooser);
}
@Override
public void robotPeriodic() {
}
@Override
public void autonomousInit() {
m_autoSelected = m_chooser.getSelected();
}
@Override
public void autonomousPeriodic() {
}
@Override
public void teleopPeriodic() {
Update_Limelight_Tracking();
double steer = m_Controller.getX(Hand.kRight);
double drive = -m_Controller.getY(Hand.kLeft);
boolean auto = m_Controller.getAButton();
steer *= 0.70;
drive *= 0.70;
if (auto)
{
if (m_LimelightHasValidTarget)
{
m_Drive.arcadeDrive(m_LimelightDriveCommand,m_LimelightSteerCommand);
}
else
{
m_Drive.arcadeDrive(0.0,0.0);
}
}
else
{
m_Drive.arcadeDrive(drive,steer);
}
}
@Override
public void testPeriodic() {
}
/**
* Cette fonction implémente une méthode simple pour générer des commandes de conduite et de direction
* basées sur les données de suivi d'une caméra limelight.
*/
public void Update_Limelight_Tracking()
{
// Ces nombres doivent être ajustés pour votre Robot ! Soyez prudent !
final double STEER_K = 0.03; // intensité de rotation vers la cible
final double DRIVE_K = 0.26; // intensité d'avancement vers la cible
final double DESIRED_TARGET_AREA = 13.0; // Surface de la cible quand le robot atteint le mur
final double MAX_DRIVE = 0.7; // Limite de vitesse simple pour ne pas aller trop vite
double tv = NetworkTableInstance.getDefault().getTable("limelight").getEntry("tv").getDouble(0);
double tx = NetworkTableInstance.getDefault().getTable("limelight").getEntry("tx").getDouble(0);
double ty = NetworkTableInstance.getDefault().getTable("limelight").getEntry("ty").getDouble(0);
double ta = NetworkTableInstance.getDefault().getTable("limelight").getEntry("ta").getDouble(0);
if (tv < 1.0)
{
m_LimelightHasValidTarget = false;
m_LimelightDriveCommand = 0.0;
m_LimelightSteerCommand = 0.0;
return;
}
m_LimelightHasValidTarget = true;
// Commencer avec une direction proportionnelle
double steer_cmd = tx * STEER_K;
m_LimelightSteerCommand = steer_cmd;
// essayer d'avancer jusqu'à ce que la surface de la cible atteigne la surface désirée
double drive_cmd = (DESIRED_TARGET_AREA - ta) * DRIVE_K;
// ne pas laisser le robot aller trop vite vers l'objectif
if (drive_cmd > MAX_DRIVE)
{
drive_cmd = MAX_DRIVE;
}
m_LimelightDriveCommand = drive_cmd;
}
}
Voici un diagramme de blocs pour un VI LabView qui lit les données de suivi d'une Limelight et génère des commandes de conduite et de direction. Cette image est un "LabView Snippet". Enregistrez simplement le fichier image sur votre ordinateur puis faites-le glisser dans un VI LabView et le diagramme de blocs sera reproduit.
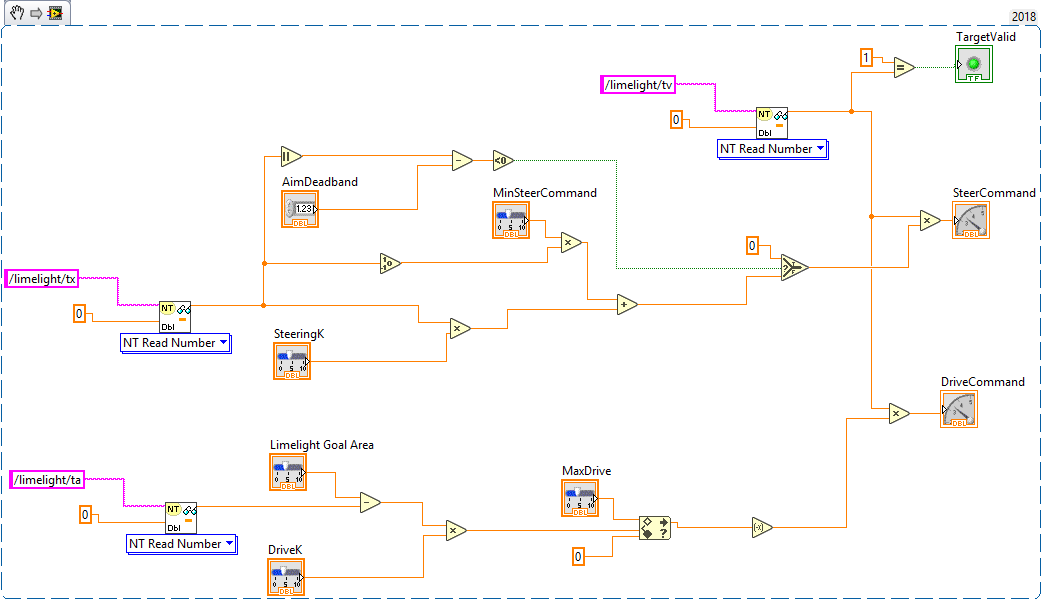
Vous pouvez également télécharger le code source LabView complet depuis ce lien