2019 Deep Space ロボット
2019年のFRCゲーム「Deep Space」では、多くのゴールの上にビジョンターゲットが設置されていました。 以下に、Deep Spaceでゴールに向かって自動的に走行するシンプルな方法を実装した、JavaとLabviewの完全なサンプルプログラムを紹介します。
これらは非常にシンプルなプログラムであり、limelightのトラッキングデータを使用してロボットを制御するコンセプトを示すことのみを目的としています。 各プログラムでは、ゲームパッドでロボットを操縦できます。 「A」ボタンを押し続けると、limelightが有効なターゲットを検出している場合(パイプラインの設定に依存)、ロボットは自動的にターゲットに向かって走行します。 コード内の各種定数は、お使いのロボットに合わせて慎重に調整してください。 ロボットによって旋回や走行のしやすさが異なるため、比例制御定数の調整はケースバイケースで行う必要があります。 limelightの追従動作を有効にする前に、ゲームパッドコントローラーでロボットが正しく動作することを確認してください。
- Java
- LabView
package frc.robot;
import edu.wpi.first.wpilibj.TimedRobot;
import edu.wpi.first.wpilibj.smartdashboard.SendableChooser;
import edu.wpi.first.wpilibj.smartdashboard.SmartDashboard;
import edu.wpi.first.wpilibj.VictorSP;
import edu.wpi.first.wpilibj.SpeedControllerGroup;
import edu.wpi.first.wpilibj.XboxController;
import edu.wpi.first.wpilibj.GenericHID.Hand;
import edu.wpi.first.wpilibj.drive.DifferentialDrive;
import edu.wpi.first.networktables.*;
public class Robot extends TimedRobot {
private static final String kDefaultAuto = "Default";
private static final String kCustomAuto = "My Auto";
private String m_autoSelected;
private final SendableChooser<String> m_chooser = new SendableChooser<>();
private VictorSP m_Left0 = new VictorSP(0);
private VictorSP m_Left1 = new VictorSP(1);
private VictorSP m_Right0 = new VictorSP(2);
private VictorSP m_Right1 = new VictorSP(3);
private SpeedControllerGroup m_LeftMotors = new SpeedControllerGroup(m_Left0,m_Left1);
private SpeedControllerGroup m_RightMotors = new SpeedControllerGroup(m_Right0,m_Right1);
private DifferentialDrive m_Drive = new DifferentialDrive(m_LeftMotors,m_RightMotors);
private XboxController m_Controller = new XboxController(0);
private boolean m_LimelightHasValidTarget = false;
private double m_LimelightDriveCommand = 0.0;
private double m_LimelightSteerCommand = 0.0;
@Override
public void robotInit() {
m_chooser.setDefaultOption("Default Auto", kDefaultAuto);
m_chooser.addOption("My Auto", kCustomAuto);
SmartDashboard.putData("Auto choices", m_chooser);
}
@Override
public void robotPeriodic() {
}
@Override
public void autonomousInit() {
m_autoSelected = m_chooser.getSelected();
}
@Override
public void autonomousPeriodic() {
}
@Override
public void teleopPeriodic() {
Update_Limelight_Tracking();
double steer = m_Controller.getX(Hand.kRight);
double drive = -m_Controller.getY(Hand.kLeft);
boolean auto = m_Controller.getAButton();
steer *= 0.70;
drive *= 0.70;
if (auto)
{
if (m_LimelightHasValidTarget)
{
m_Drive.arcadeDrive(m_LimelightDriveCommand,m_LimelightSteerCommand);
}
else
{
m_Drive.arcadeDrive(0.0,0.0);
}
}
else
{
m_Drive.arcadeDrive(drive,steer);
}
}
@Override
public void testPeriodic() {
}
/**
* この関数は、limelightカメラからのトラッキングデータに基づいて
* 走行およびステアリングコマンドを生成するシンプルな方法を実装しています。
*/
public void Update_Limelight_Tracking()
{
// これらの数値はお使いのロボットに合わせて調整する必要があります!注意してください!
final double STEER_K = 0.03; // ターゲットに向かってどれだけ強く旋回するか
final double DRIVE_K = 0.26; // ターゲットに向かってどれだけ強く前進するか
final double DESIRED_TARGET_AREA = 13.0; // ロボットが壁に到達したときのターゲットの面積
final double MAX_DRIVE = 0.7; // 速すぎる走行を防ぐためのシンプルな速度制限
double tv = NetworkTableInstance.getDefault().getTable("limelight").getEntry("tv").getDouble(0);
double tx = NetworkTableInstance.getDefault().getTable("limelight").getEntry("tx").getDouble(0);
double ty = NetworkTableInstance.getDefault().getTable("limelight").getEntry("ty").getDouble(0);
double ta = NetworkTableInstance.getDefault().getTable("limelight").getEntry("ta").getDouble(0);
if (tv < 1.0)
{
m_LimelightHasValidTarget = false;
m_LimelightDriveCommand = 0.0;
m_LimelightSteerCommand = 0.0;
return;
}
m_LimelightHasValidTarget = true;
// 比例ステアリングから開始
double steer_cmd = tx * STEER_K;
m_LimelightSteerCommand = steer_cmd;
// ターゲット面積が目標面積に達するまで前進を試みる
double drive_cmd = (DESIRED_TARGET_AREA - ta) * DRIVE_K;
// ロボットがゴールに速すぎる速度で突入しないようにする
if (drive_cmd > MAX_DRIVE)
{
drive_cmd = MAX_DRIVE;
}
m_LimelightDriveCommand = drive_cmd;
}
}
以下は、Limelightからトラッキングデータを読み取り、走行およびステアリングコマンドを生成するLabView VIのブロックダイアグラムです。この画像は「LabViewスニペット」です。 画像ファイルをコンピュータに保存し、LabView VIにドラッグするだけでブロックダイアグラムが再現されます。
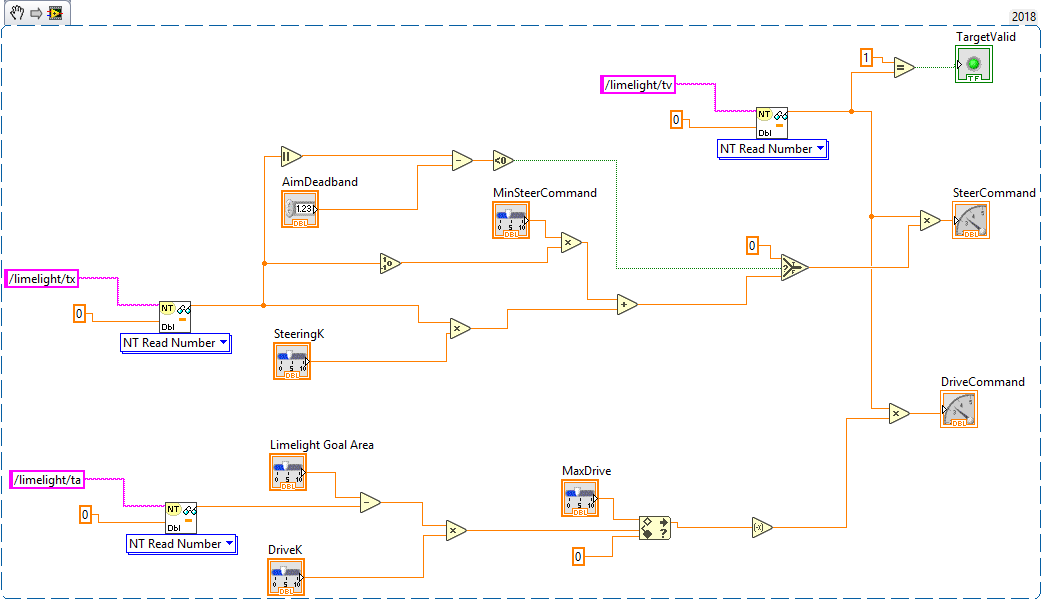
Labviewのソースコード全体はこちらのリンクからダウンロードすることもできます。