Robot Deep Space 2019
El juego de FRC 2019 Deep Space tenía objetivos de visión sobre muchas de las metas. A continuación puedes encontrar programas de ejemplo completos en Java y Labview que implementan un método simple para conducir automáticamente hacia una meta en Deep Space.
Estos son programas muy simples y solo están destinados a mostrar el concepto de usar datos de seguimiento de limelight para controlar tu robot. En cada programa, puedes conducir tu robot con un gamepad. Si mantienes presionado el botón 'A', y el limelight ve un objetivo válido (dependiendo de la configuración en tu pipeline) entonces el robot conducirá automáticamente hacia el objetivo. Ten cuidado de ajustar las diversas constantes en el código para tu robot en particular. Algunos robots giran o conducen más fácilmente que otros, por lo que el ajuste de las constantes de control proporcional debe hacerse caso por caso. Asegúrate de que el robot conduzca correctamente usando el controlador gamepad antes de habilitar el comportamiento de búsqueda del limelight.
- Java
- LabView
package frc.robot;
import edu.wpi.first.wpilibj.TimedRobot;
import edu.wpi.first.wpilibj.smartdashboard.SendableChooser;
import edu.wpi.first.wpilibj.smartdashboard.SmartDashboard;
import edu.wpi.first.wpilibj.VictorSP;
import edu.wpi.first.wpilibj.SpeedControllerGroup;
import edu.wpi.first.wpilibj.XboxController;
import edu.wpi.first.wpilibj.GenericHID.Hand;
import edu.wpi.first.wpilibj.drive.DifferentialDrive;
import edu.wpi.first.networktables.*;
public class Robot extends TimedRobot {
private static final String kDefaultAuto = "Default";
private static final String kCustomAuto = "My Auto";
private String m_autoSelected;
private final SendableChooser<String> m_chooser = new SendableChooser<>();
private VictorSP m_Left0 = new VictorSP(0);
private VictorSP m_Left1 = new VictorSP(1);
private VictorSP m_Right0 = new VictorSP(2);
private VictorSP m_Right1 = new VictorSP(3);
private SpeedControllerGroup m_LeftMotors = new SpeedControllerGroup(m_Left0,m_Left1);
private SpeedControllerGroup m_RightMotors = new SpeedControllerGroup(m_Right0,m_Right1);
private DifferentialDrive m_Drive = new DifferentialDrive(m_LeftMotors,m_RightMotors);
private XboxController m_Controller = new XboxController(0);
private boolean m_LimelightHasValidTarget = false;
private double m_LimelightDriveCommand = 0.0;
private double m_LimelightSteerCommand = 0.0;
@Override
public void robotInit() {
m_chooser.setDefaultOption("Default Auto", kDefaultAuto);
m_chooser.addOption("My Auto", kCustomAuto);
SmartDashboard.putData("Auto choices", m_chooser);
}
@Override
public void robotPeriodic() {
}
@Override
public void autonomousInit() {
m_autoSelected = m_chooser.getSelected();
}
@Override
public void autonomousPeriodic() {
}
@Override
public void teleopPeriodic() {
Update_Limelight_Tracking();
double steer = m_Controller.getX(Hand.kRight);
double drive = -m_Controller.getY(Hand.kLeft);
boolean auto = m_Controller.getAButton();
steer *= 0.70;
drive *= 0.70;
if (auto)
{
if (m_LimelightHasValidTarget)
{
m_Drive.arcadeDrive(m_LimelightDriveCommand,m_LimelightSteerCommand);
}
else
{
m_Drive.arcadeDrive(0.0,0.0);
}
}
else
{
m_Drive.arcadeDrive(drive,steer);
}
}
@Override
public void testPeriodic() {
}
/**
* Esta función implementa un método simple para generar comandos de conducción y dirección
* basados en los datos de seguimiento de una cámara limelight.
*/
public void Update_Limelight_Tracking()
{
// ¡Estos números deben ajustarse para tu Robot! ¡Ten cuidado!
final double STEER_K = 0.03; // qué tan fuerte girar hacia el objetivo
final double DRIVE_K = 0.26; // qué tan fuerte conducir hacia adelante hacia el objetivo
final double DESIRED_TARGET_AREA = 13.0; // Área del objetivo cuando el robot llega a la pared
final double MAX_DRIVE = 0.7; // Límite de velocidad simple para no conducir demasiado rápido
double tv = NetworkTableInstance.getDefault().getTable("limelight").getEntry("tv").getDouble(0);
double tx = NetworkTableInstance.getDefault().getTable("limelight").getEntry("tx").getDouble(0);
double ty = NetworkTableInstance.getDefault().getTable("limelight").getEntry("ty").getDouble(0);
double ta = NetworkTableInstance.getDefault().getTable("limelight").getEntry("ta").getDouble(0);
if (tv < 1.0)
{
m_LimelightHasValidTarget = false;
m_LimelightDriveCommand = 0.0;
m_LimelightSteerCommand = 0.0;
return;
}
m_LimelightHasValidTarget = true;
// Comenzar con dirección proporcional
double steer_cmd = tx * STEER_K;
m_LimelightSteerCommand = steer_cmd;
// intentar conducir hacia adelante hasta que el área del objetivo alcance nuestra área deseada
double drive_cmd = (DESIRED_TARGET_AREA - ta) * DRIVE_K;
// no dejar que el robot conduzca demasiado rápido hacia la meta
if (drive_cmd > MAX_DRIVE)
{
drive_cmd = MAX_DRIVE;
}
m_LimelightDriveCommand = drive_cmd;
}
}
Aquí hay un diagrama de bloques para un VI de LabView que lee datos de seguimiento de un Limelight y genera comandos de conducción y dirección. Esta imagen es un "LabView Snippet". Solo guarda el archivo de imagen en tu computadora y luego arrástralo a un VI de labview y el diagrama de bloques se reproducirá.
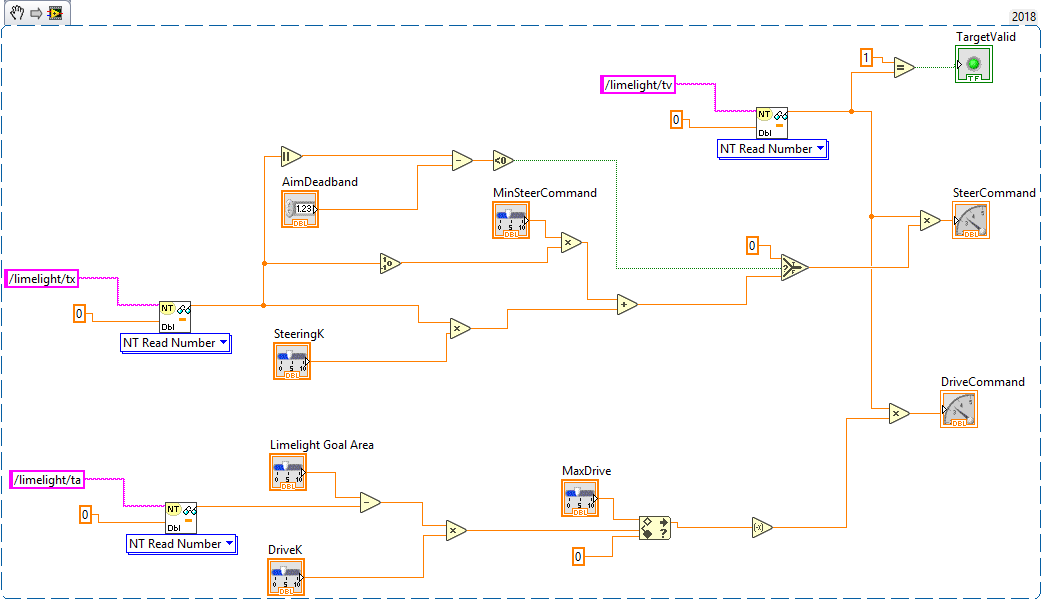
También puedes descargar el código fuente completo de labview desde este enlace