Démarrage rapide Limelight 3

Spécifications matérielles
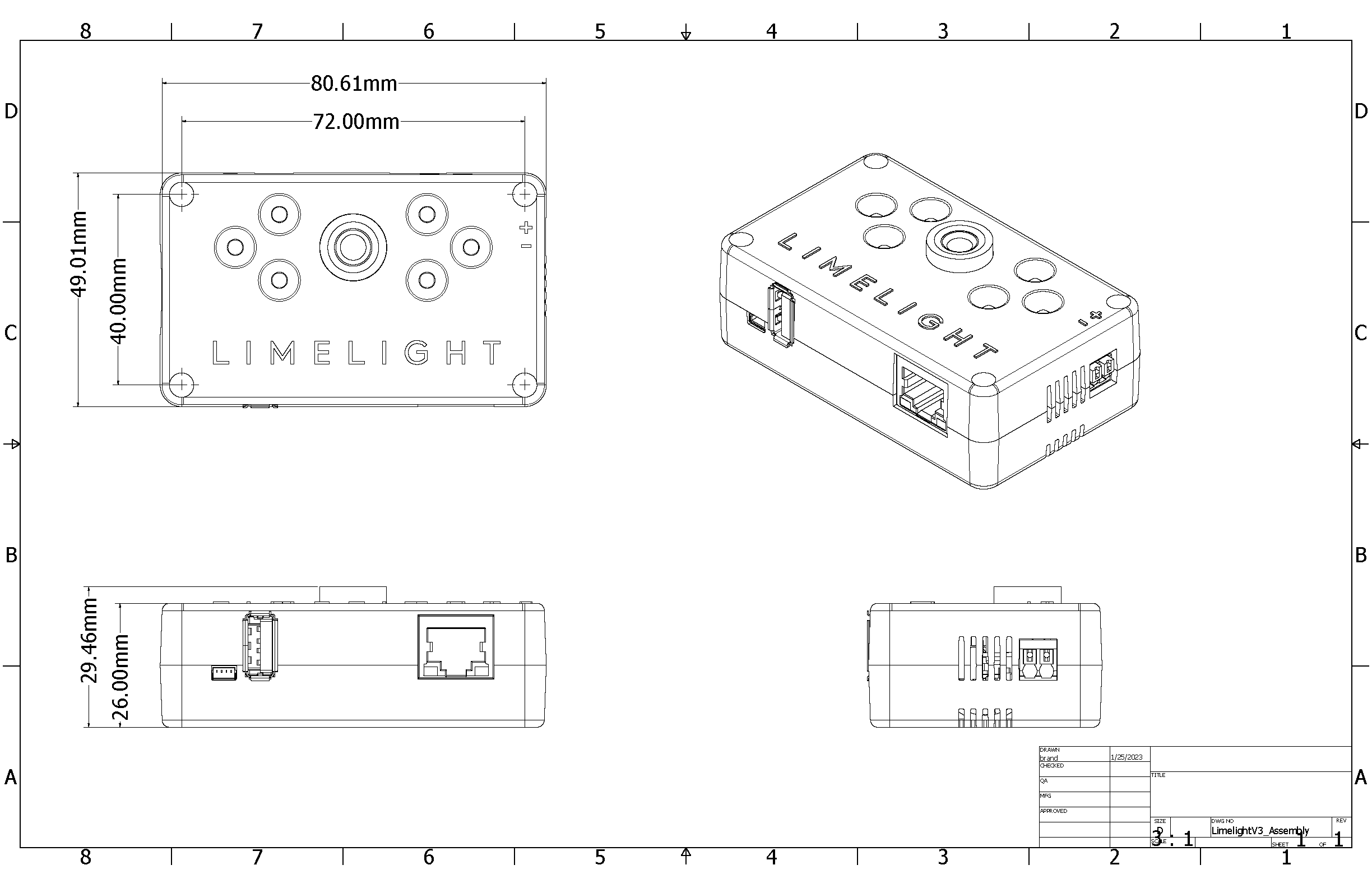
- Dimensions : 3,174po x 1,930po (80,61mm x 49,01mm)
- Épaisseur : 1,160po (29,46mm)
- Masse : 0,17 lb
- Montage par trous traversants #10 / M4
- Tension d'entrée : 4,1V-16V
- Tension d'entrée (variante Limelight 3 2025 bouton rouge) : 4,1V-24V, 30V maximum absolu
- Consommation maximale : 7W
- Éclairage LED : 600 lumens, illumination verte
- Capteur : OV5647 Couleur à obturateur déroulant (640x480 @ 90FPS)
- Objectif M12 remplaçable
- Champ de vision horizontal 62,5°, champ de vision vertical 48,9°
- Boîtier ABS noir
- Port Ethernet RJ45 10/100
- Port hôte USB-A 5Gbps
- Port CAN Bus
- Port I2C
- Voyants d'état : Vert (détection de cible), Jaune (état réseau)
- Support de l'accélérateur de réseau neuronal Google Coral USB
Capacités logicielles (Limelight OS)
- Vision haute performance prête à l'emploi. Aucune expérience requise.
- Interface utilisateur web auto-hébergée pour la configuration des pipelines de vision
- Support REST/HTTP, Websocket, NetworkTables, ModbusTCP et ROS
- Exposition fixe configurable, gain du capteur, résolution et fréquence d'images.
- Configurez 10 pipelines de vision interchangeables à chaud :
- Pipelines Python personnalisés avec OpenCV 4.10, numpy, etc.
- Suivi AprilTag 2D, 3D et localisation du robot
- Localisation 3D complète (GPS Robot) avec MegaTag1
- Localisation 3D complète de haute précision (GPS Robot) avec fusion IMU externe avec MegaTag2
- 20fps @ 1280x960 (réduction 2x), 50fps @ 640x480 (réduction 2x)
- Visualiseur 3D complet dans l'interface web
- Pipelines de détection de blobs couleur à 90FPS
- Pipelines de détection d'objets par réseau neuronal
- Pipelines de classification d'images par réseau neuronal
- Pipelines de suivi de codes-barres
- Pipeline Viewfinder pour streaming à faible latence
- Interface de calibration intrinsèque Charuco intégrée pour des pipelines de vision haute précision.
- Visualisation de la calibration intrinsèque
- Streaming MJPEG à faible latence intégré. Orientation du flux configurable
1. Montage du Limelight 3
Montage par trous traversants
- Utilisez des vis #10-32 ou #10-24 de 1 1/4" avec des écrous autobloquants
- Alternativement, utilisez des boulons M4 de 38mm avec des écrous autobloquants
- Utilisez des rondelles en plastique pour préserver la finition du boîtier
2. Câblage du Limelight 3
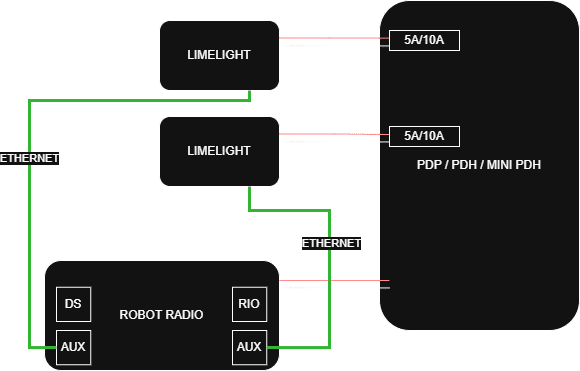
Alimentation
- Faites passer deux fils de 18-20AWG de votre Limelight vers un emplacement de votre PDP/PDH
- Ajoutez un disjoncteur de 5A sur le même emplacement
- Important : Un VRM dédié est fortement recommandé pour les LL3 pré-2025 (bouton blanc) pour la protection contre les pics de charge dus au freinage régénératif des transmissions swerve + événements de déconnexion de batterie
- (Non requis) Utilisez des embouts Weidmuller pour des résultats optimaux (illustré, fil 20AWG avec embouts orange Weidmuller 20AWG)
- Embouts :
- Outils de sertissage d'embouts économiques :

Ethernet
- Faites passer un câble ethernet de votre Limelight vers la radio de votre robot
- Utilisez des câbles Cat6 torsadés avec des fils multibrins (idéalement 20AWG)
- Ajoutez un serre-câble à votre câble ethernet
3. Accès à l'interface web
Après avoir connecté votre Limelight 3 à votre réseau :
- Allumez votre robot et connectez votre ordinateur portable au réseau de votre robot
- Utilisez l'une de ces méthodes pour accéder à l'interface web :
- Méthode 1 : Ouvrez l'application Limelight Hardware Manager, recherchez les Limelights et double-cliquez sur votre Limelight lorsqu'il apparaît
- Méthode 2 : Ouvrez un navigateur web et accédez à
http://limelight.local:5801 - Méthode 3 : Ouvrez un navigateur web et accédez à l'adresse IP statique de votre Limelight avec le port 5801 (si configuré)
Une fois connecté, vous aurez accès à :
- Onglet Paramètres - Configurez le numéro d'équipe, le nom d'hôte et d'autres paramètres système
- Onglets Pipeline de vision - Configurez et ajustez vos pipelines de traitement de vision
- Onglet Caméra et réticule - Ajustez les paramètres de la caméra et du réticule
- Onglet Visualisation 3D - Visualisez la détection AprilTag et la localisation en temps réel
Toute la configuration se fait via cette interface web. Les modifications sont automatiquement enregistrées sur votre Limelight.
4. Mise à jour de LimelightOS
Sauvegardez vos pipelines et scripts avant la mise à jour - ils seront effacés pendant ce processus !
- Éteignez votre Limelight
- Téléchargez les derniers pilotes USB, image Limelight OS et outil Balena Flash
- Connectez un câble USB->USB-C de votre ordinateur portable à votre Limelight (votre Limelight s'allumera automatiquement)
- Exécutez "Balena Etcher" en tant qu'administrateur
- Votre machine peut prendre jusqu'à 20 secondes pour reconnaître la caméra
- Sélectionnez la dernière image .zip dans votre dossier de téléchargements
- Sélectionnez un périphérique "Compute Module" dans le menu "Drives"
- Cliquez sur "Flash"
- Une fois le flashage terminé, retirez le câble USB de votre Limelight
Connectez le câble USB-C uniquement pendant l'imagerie. Le Limelight entre dans un mode flash spécial lorsque le câble USB est connecté. Vous ne pourrez pas accéder à l'interface web tant que le Limelight est en mode flash.
5. Configuration réseau
Configuration du numéro d'équipe (Requis pour FRC / Networktables)
- Allumez votre robot et connectez votre ordinateur portable au réseau de votre robot
- Ouvrez le Limelight Hardware Manager, recherchez les Limelights et double-cliquez sur l'entrée qui apparaît
- Alternativement, accédez à http://limelight.local:5801
- Allez dans l'onglet "Settings"
- Entrez votre numéro d'équipe et appuyez sur "Update Team Number"
Configuration d'un nom d'hôte unique (Requis uniquement pour les systèmes FRC / Networktables avec plusieurs Limelights)
- Si vous utilisez plusieurs Limelights, chaque Limelight doit avoir un nom d'hôte unique
- Dans l'onglet paramètres, configurez un nom d'hôte et cliquez sur le bouton "set hostname"
Configuration d'une IP statique (Recommandé, non requis)
- Changez "IP Assignment" en "Static"
- Définissez l'adresse IP sur "10.TE.AM.11"
- L'équipe 916 utilise 10.9.16.xx
- L'équipe 9106 utilise 10.91.6.xx
- L'équipe 9016 utilise 10.90.16.xx
- Définissez le masque de sous-réseau sur "255.255.255.0"
- Définissez la passerelle sur "10.TE.AM.1"
- Cliquez sur "Update"
- Redémarrez votre robot
- Accédez à votre panneau de configuration à 10.TE.AM.11:5801 et au flux caméra à 10.TE.AM.11:5800
- Si vous utilisez plusieurs Limelights, donnez à chaque Limelight une adresse IP statique unique
Q. Pourquoi recommandons-nous l'utilisation d'une adresse IP statique ?
R. Cela réduit de plusieurs secondes le temps de démarrage du Limelight. Deuxièmement, les équipes ont historiquement eu des problèmes avec l'attribution DHCP et les répondeurs mDNS sur les terrains FRC réels et avec le firmware des radios d'événements.
Nous recommandons également de définir des adresses IP statiques sur votre robo-rio et votre station de pilotage. Les paramètres réseau à utiliser sur tous ces appareils se trouvent dans la partie inférieure de cette page web
6. Contrôle des LEDs
Le Limelight 3 comprend des LEDs d'illumination vertes intégrées avec une sortie de 600 lumens. Ces LEDs peuvent être contrôlées de plusieurs façons :
Via l'interface web
- Accédez à l'onglet Camera & Crosshair dans l'interface web
- Utilisez le menu déroulant LED Mode pour sélectionner :
- On - Toujours allumé
- Off - Toujours éteint
- Blink - Faire clignoter les LEDs
- Pipeline - Les LEDs s'allument lorsqu'une cible est détectée
Via NetworkTables ou API
- Définissez la valeur "ledMode" :
- 0 : Par défaut du pipeline
- 1 : Forcer éteint
- 2 : Forcer clignotement
- 3 : Forcer allumé
7. Mise à niveau vers obturateur global Limelight 3
- Imprimez la nouvelle moitié avant du boîtier https://downloads.limelightvision.io/cad/ll3_conversion_stl.stl https://downloads.limelightvision.io/cad/ll3_conversion_step.stp
Note - vous pouvez utiliser le boîtier d'origine, mais seuls les deux trous de montage supérieurs fonctionneront pour le nouveau module caméra.
-
Fixez le module caméra ov9281 suivant (ne fixez pas la carte LED) https://www.robotshop.com/products/ov9281-110-mono-camera-for-raspberry-pi-global-shutter-1mp
-
Téléchargez l'image Limelight 3G depuis la page de téléchargements C'est tout !
8. Dépannage
Indicateurs des voyants d'état
- Voyant vert : Clignote lentement (pas de cibles), clignote rapidement (cibles détectées)
- Voyant jaune : Clignote (pas d'IP statique), fixe (IP statique attribuée)
Motifs de diagnostic LED
- Clignotement alterné gauche/droite ou haut/bas : Le câble interne de la caméra s'est déconnecté ou le capteur d'image est endommagé
- Clignotement rapide (toutes les LEDs) : Le bouton de réinitialisation réseau a été maintenu pendant au moins 10 secondes
- Séquence de démarrage répétée : Le logiciel plante, possiblement en raison de dommages matériels
Si limelight.local:5801 ne fonctionne pas
- Vérifiez si Bonjour est installé (Windows : ajout/suppression de programmes)
- Désinstallez "bonjour print services" si vous avez deux éléments Bonjour
- Installez Bonjour depuis la page de téléchargements si manquant
Réinitialiser l'adresse IP
- Maintenez le bouton de configuration pendant 10 secondes après le démarrage de votre Limelight
- La configuration réseau sera réinitialisée en adressage dynamique au prochain démarrage