Estimando Distância
Usando uma Câmera com Ângulo Fixo
Se sua câmera de rastreamento de visão está montada no seu robô de forma que o ângulo entre o plano do chão e sua linha de visão não muda, então você pode usar esta técnica para calcular com muita precisão a distância até um alvo. Você pode então usar este valor de distância para mover seu robô para frente e para trás para chegar ao alcance perfeito ou ajustar a potência de um mecanismo de lançamento.
Veja o diagrama abaixo. Neste contexto, todas as variáveis são conhecidas: a altura do alvo (h2) é conhecida porque é uma propriedade do campo. A altura da sua câmera acima do chão (h1) é conhecida e seu ângulo de montagem é conhecido (a1). O Limelight (ou seu sistema de visão) pode informar o ângulo y até o alvo (a2).
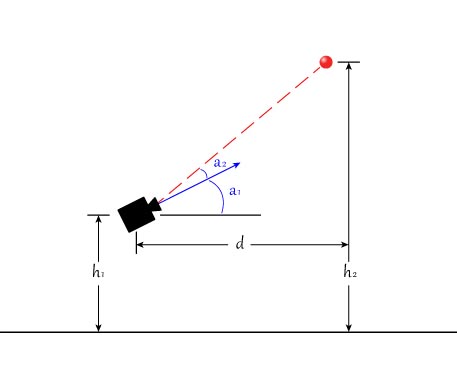
Podemos resolver para d usando a seguinte equação:
tan(a1+a2) = (h2-h1) / d
"d = (h2-h1) / tan(a1+a2)"
A função "tan" geralmente espera uma entrada medida em radianos. Para converter uma medida de ângulo de graus para radianos, multiplique por (3.14159/180.0). Veja o exemplo de código completo abaixo.
- Java
- C++
NetworkTable table = NetworkTableInstance.getDefault().getTable("limelight");
NetworkTableEntry ty = table.getEntry("ty");
double targetOffsetAngle_Vertical = ty.getDouble(0.0);
// quantos graus para trás seu limelight está rotacionado em relação à vertical perfeita?
double limelightMountAngleDegrees = 25.0;
// distância do centro da lente do Limelight até o chão
double limelightLensHeightInches = 20.0;
// distância do alvo até o chão
double goalHeightInches = 60.0;
double angleToGoalDegrees = limelightMountAngleDegrees + targetOffsetAngle_Vertical;
double angleToGoalRadians = angleToGoalDegrees * (3.14159 / 180.0);
// calcular distância
double distanceFromLimelightToGoalInches = (goalHeightInches - limelightLensHeightInches) / Math.tan(angleToGoalRadians);
std::shared_ptr<NetworkTable> table = nt::NetworkTableInstance::GetDefault().GetTable("limelight");
double targetOffsetAngle_Vertical = table->GetNumber("ty",0.0);
// quantos graus para trás seu limelight está rotacionado em relação à vertical perfeita?
double limelightMountAngleDegrees = 25.0;
// distância do centro da lente do Limelight até o chão
double limelightLensHeightInches = 20.0;
// distância do alvo até o chão
double goalHeightInches = 60.0;
double angleToGoalDegrees = limelightMountAngleDegrees + targetOffsetAngle_Vertical;
double angleToGoalRadians = angleToGoalDegrees * (3.14159 / 180.0);
// calcular distância
double distanceFromLimelightToGoalInches = (goalHeightInches - limelightLensHeightInches)/tan(angleToGoalRadians);
Ao usar esta técnica, é importante escolher o ângulo de montagem da sua câmera cuidadosamente. Você quer ser capaz de ver o alvo tanto quando está muito perto quanto muito longe. Você também não quer que este ângulo mude, então monte-a de forma segura e evite usar furos alongados na geometria de montagem.
Se você está tendo dificuldade em descobrir qual é o ângulo a1, você também pode usar a equação acima para resolver para a1. Basta colocar seu robô a uma distância conhecida (medindo a partir da lente da sua câmera) e resolver a mesma equação para a1.
No caso em que seu alvo está quase na mesma altura que sua câmera, esta técnica não é útil.
Usando Área para Estimar Distância
Outra maneira simples de estimar distância é usar a área do contorno que você está rastreando. Este é um método muito simples de implementar, mas não fornece resultados extremamente precisos. Tudo que você faz é apontar sua câmera de visão para o alvo a partir de uma distância conhecida e anotar a área do blob. Certifique-se de estar usando uma representação precisa do alvo de visão do campo real e certifique-se de estar apontando para ele a partir da sua localização de tiro desejada. Você pode então fazer isso a partir de algumas distâncias diferentes e criar uma tabela com esses valores. Em 2016, usamos este método para ajustar a mira da nossa torre de 2 eixos com base em quão longe do gol estávamos.