سجل تغييرات البرنامج والتعليقات
قم بإرسال المشكلات وطلبات الميزات عبر البريد الإلكتروني أو إلى مستودع تعليقات Limelight
نظام Limelight OS 2024.10 (9/4/24)
دعم Limelight 3A لـ FTC
- Limelight3A مدعوم بالكامل
- يمكن استخدام 3A في كل من FTC و FRC
تحديثات خريطة AprilTag
- يدعم محرر الخرائط الآن إنشاء خرائط FTC القياسية والماسية
- ستعرض واجهة LLOS على الويب تلقائيًا نوع الحقل الصحيح بناءً على الخريطة المحملة
- تُظهر جميع أدوات تصور الحقل عبر الأدوات والواجهات مناطق التحالف وشبكات بلاط FTC.
- تم تحسين أداء المصور ثلاثي الأبعاد.
دعم Limelight USB على ControlHub و RoboRio
- يمكن لفرق FTC استخدام Limelight واحد قادر على USB على Control Hub
- يمكن لفرق FRC استخدام ما يصل إلى 16 جهاز Limelight قادر على USB على RoboRio. تقوم أجهزة Limelight USB بملء جداول الشبكة تلقائيًا تمامًا مثل أجهزة Limelight الإيثرنت.
- لاستخدام أجهزة Limelight USB متعددة، امنح كل LL فهرس USB فريد واسم مضيف فريد.
ترقيات اتصال USB
- لم يعد نظام MacOS يستخدم واجهة Limelight USB Ethernet للوصول إلى الإنترنت
- لم يعد نظام Windows يحاول استخدام واجهة Limelight USB Ethernet للوصول إلى الإنترنت
تحديثات واجهة برمجة التطبيقات REST
- إصلاح طلب POST لـ update-robotorientation.
- أصبح MT2 متاحًا بالكامل دون الحاجة إلى NetworkTables.
- بمجرد استخدام مسار update-robotorientation، يتم تعطيل تحديثات توجيه NetworkTables حتى إعادة التشغيل.
نظام التشغيل Limelight OS 2024.9.1 (7/7/24)
- أداة بناء الخريطة تقبل/تحول الآن تخطيطات علامات أبريل بصيغة .json الخاصة بـ WPILib
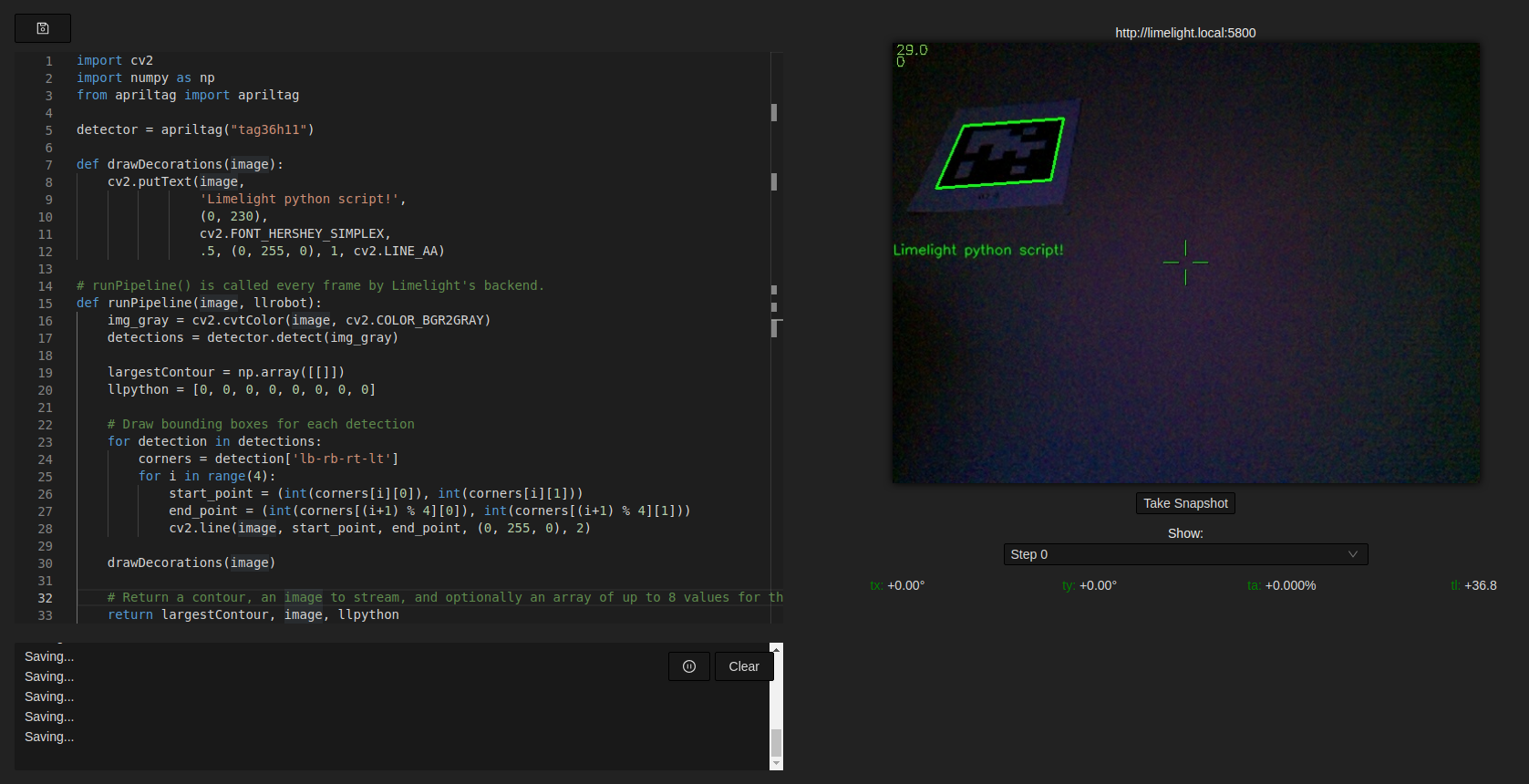
- إضافة AprilTag3 إلى سكريبتات Snap في بايثون (from apriltag import apriltag)
- راجع المثال في مستودع الأمثلة على GitHub
- إصلاح مشكلة بوابة اتصال USB على نظام Windows.
نظام Limelight OS 2024.9 (7/5/24)
ترقيات MegaTag
-
انتقل نظام Limelight OS إلى NetworkTables 4.0
-
يستخدم MegaTag2 الآن getAtomic() الخاص بـ NT4 لاسترداد تحديثات IMU المختومة بالوقت من roboRIO.
-
يتم مطابقة إطارات الصور المختومة بالوقت مع أكثر عينتين IMU صلة قبل إجراء الاستيفاء.
-
تمت إضافة NT4 flush() إلى LimelightLib. إضافة Flush() إلى الإصدارات القديمة من Limelight OS ستقربك كثيرًا من أداء 2024.9، ولكن NT4 يضمن أن تكون الدقة عالية دائمًا.
-
الروبوت المرئي لـ MT2 لديه الآن مصدات خضراء، ويستخدم روبوت MT1 المرئي مصدات صفراء.
-
أصبحت المقاييس قابلة للطي الآن، ويمكن إخفاء الروبوتات الافتراضية.
-
يوضح الفيديو التالي كيف أن MegaTag 2 الخاص بـ 2024.9 (الروبوت الأخضر) مع flush() على جانب الروبوت أكثر قوة من MegaTag2 الخاص بـ 2024.5 بدون Flush() (الروبوت الأحمر)
معرف USB وعناوين IP USB الجديدة
- قم بتعيين "معرف USB" في صفحة الإعدادات لاستخدام أجهزة Limelight USB متعددة على أي نظام.
- ستستخدم واجهة USB-Ethernet التي تظهر على نظامك عنوان IP يتم تحديده بواسطة معرف USB
- ستستخدم أنظمة Linux/Android/Mac الآن الشبكة الفرعية 172.29.0.0/24 بشكل افتراضي
- ستستخدم أنظمة Windows الآن الشبكة الفرعية 172.28.0.0/24 بشكل افتراضي.
- إذا تم تعيين USBID، تتغير الشبكة الفرعية إلى 172.29.(USBID).0/24 لـ Linux/Android/Mac و 172.28.(USBID).0/24 لـ Windows.
- يمكنك الآن، على سبيل المثال، توصيل أربعة أجهزة Limelight بموزع USB واحد عن طريق ضبط أسماء المضيفين الخاصة بها ومعرفات USB
المصنفات العصبية للمعالج المركزي
- قم بتحميل مصنف .tflite للمعالج المركزي لتمكين التصنيف العصبي بدون Google Coral. يمكنك توقع 15-18 إطارًا في الثانية على متغيرات LL3.
- يأتي 2024.9 مع مصنف افتراضي للمعالج المركزي.
- قم بتعيين وقت تشغيل المصنف إلى "CPU" لتمكين هذه الميزة
كاشفات عصبية للمعالج المركزي
- قم بتحميل كاشف .tflite للمعالج المركزي لتمكين الكشف العصبي بدون Google Coral. يمكنك توقع 10 إطارات في الثانية على متغيرات LL3.
- يأتي 2024.9 مع كاشف افتراضي للمعالج المركزي.
- قم بتعيين وقت تشغيل الكاشف إلى "CPU" لتمكين هذه الميزة
نظام التشغيل Limelight OS 2024.8 (7/3/24)
- إضافة مخرجات بايثون (PythonOut)، tx، ty، txnc، tync، ta إلى كائن نتائج JSON
- تحسين إضافي لتعويض التأخير في MT2
نظام التشغيل Limelight OS 2024.7 (21/5/2024)
- الترقية إلى لينكس 6.6
إصلاحات الأخطاء
- إصلاح تحويل خط أنابيب الرؤية
- إصلاح تحميلات المعايرة، تحميلات اللقطات، وتحميلات الشبكات العصبية
نظام التشغيل Limelight 2024.6 (5/8/24)
مكتبة LimelightLib Python
- pip install limelightlib-python
- تتيح لك مكتبة Python الخاصة بنا التفاعل مع أجهزة Limelight عبر USB والإيثرنت على أي منصة.
- تسمح بتكوين Limelight بالكامل دون تفاعل مع واجهة المستخدم الويب.
- تحميل خطوط الأنابيب والشبكات العصبية وخرائط الميدان وما إلى ذلك
- إجراء تغييرات في الوقت الفعلي على أي معلمة في خط الأنابيب مع خيار "الحفظ على القرص" اختياري
- نشر بيانات إدخال Python مخصصة، تعيين اتجاه الروبوت، وما إلى ذلك.
تحسينات MegaTag2
- تم تحسين تعويض تأخير جيروسكوب MegaTag2. ترقبوا المزيد من التحسينات قريبًا!
- إضافة شريط تمرير "ضبط تأخير �الجيروسكوب" إلى واجهة المستخدم. لضبط تعويض تأخير MegaTag 2 يدويًا، يمكنك تدوير الروبوت الخاص بك وضبط شريط التمرير حتى تكون نتائج التحديد المكاني مثالية أثناء الدوران.
مقاييس الانحراف المعياري
- يتضمن العارض الميداني ثلاثي الأبعاد الآن الانحرافات المعيارية لـ MegaTag1 و Megatag2 للمحاور x و y والانحراف.
نوع خط أنابيب جديد "التركيز"
- أثناء وضع "التركيز"، سيكون لديك إمكانية الوصول إلى شريط تمرير جودة البث وشريط تمرير مربع الاقتصاص
- قم بتدوير العدسة لتعظيم درجة "التركيز".
- إذا كانت الكاميرا الخاصة بك في موقع ثابت، فإن هذا يستغرق أقل من دقيقة واحدة. نوصي بالتركيز مع Limelight مثبت / مركب.
نوع خط �أنابيب جديد "الباركود"
- اكتشاف وفك تشفير رموز QR متعددة بسرعة 50-60 إطارًا في الثانية بدقة 1280×800
- اكتشاف وفك تشفير DataMatrix متعددة بسرعة 50-60 إطارًا في الثانية بدقة 1280×800
- اكتشاف وفك تشفير UPC و EAN و Code128 و PDF417 متعددة بسرعة 30 إطارًا في الثانية بدقة 1280×800
- يتم نشر سلاسل بيانات الباركود في مصفوفة nt "rawbarcodes".
- سيقوم خط أنابيب الباركود بملء جميع المقاييس ثنائية الأبعاد مثل tx و ty و ta و tcornxy وما إلى ذلك.
واجهة برمجة تطبيقات REST جديدة تمامًا
- https://docs.limelightvision.io/docs/docs-limelight/apis/rest-http-api
- تمت إعادة بناء واجهة برمجة تطبيقات REST / HTTP الخاصة بنا من الصفر.
- تسمح واجهة برمجة تطبيقات REST بتكوين Limelight بالكامل دون تفاعل مع واجهة المستخدم الويب.
- تحميل خطوط الأنابيب والشبكات العصبية وخرائط الميدان وما إلى ذلك
- إجراء تغييرات في الوقت الفعلي على أي معلمة في خط الأنابيب مع خيار "الحفظ على القرص" اختياري
- نشر بيانات إدخال Python، تعيين اتجاه الروبوت، وما إلى ذلك.
إزالة إعداد اتجاه الكاميرا من واجهة المستخدم (تغيير كاسر)
- تم استبدال هذا بخيار "اتجاه البث". لا تتأثر المعايرة والاستهداف أبدًا بهذا الخيار.
- يؤثر الخيار الجديد فقط على البث. مقلوب رأسًا على عقب، 90 درجة في اتجاه عقارب الساعة، 90 درجة عكس اتجاه عقارب الساعة، انعكاس أفقي، وانعكاس عمودي
- سيحتاج الفرق الآن إلى عكس tx و ty يدويًا حسب الحاجة أثناء استخدام الكاميرات المدورة.
إزالة دعم GRIP (تغيير كاسر)
إزالة وضع "السائق" بدون معالجة (تغيير كاسر)
- تم استبدال هذا بنوع خط أنابيب "العارض"
إضافة نوع خط أنابيب "العارض"
- يعطل خط أنابيب العارض جميع المعالجات لتقليل التأخير
- هذا يسمح للفرق بتصميم خطوط أنابيب "السائق" الخاصة بهم لأوضاع العرض فقط
ملفات خط الأنابيب تستخدم الآن تنسيق JSON (تغيير كاسر)
- لا تزال خطوط الأنابيب تستخدم امتداد الملف .vpr
- (معطل في بعض الحالات في 2024.6) ستقوم واجهة المستخدم بتحويل خطوط الأنابيب تلقائيًا إلى JSON عند استخدام زر "التحميل".
- (يعمل بشكل كامل) يمكنك أيضًا استخدام https://tools.limelightvision.io/pipeline-upgrade لترقية خطوط الأنابيب الخاصة بك
تحسين تجربة المستخدم في المعايرة
- يتم الآن تخزين إعدادات المعايرة مؤقتًا. لم تعد بحاجة إلى إدخال إعدادات المعايرة الخاصة بك في كل مرة تريد فيها المعايرة.
- تم تحديث قاموس المعايرة الافتراضي للعمل مع اللوحة الخشنة الموصى بها بحجم 800×600 مم من Calib.io.
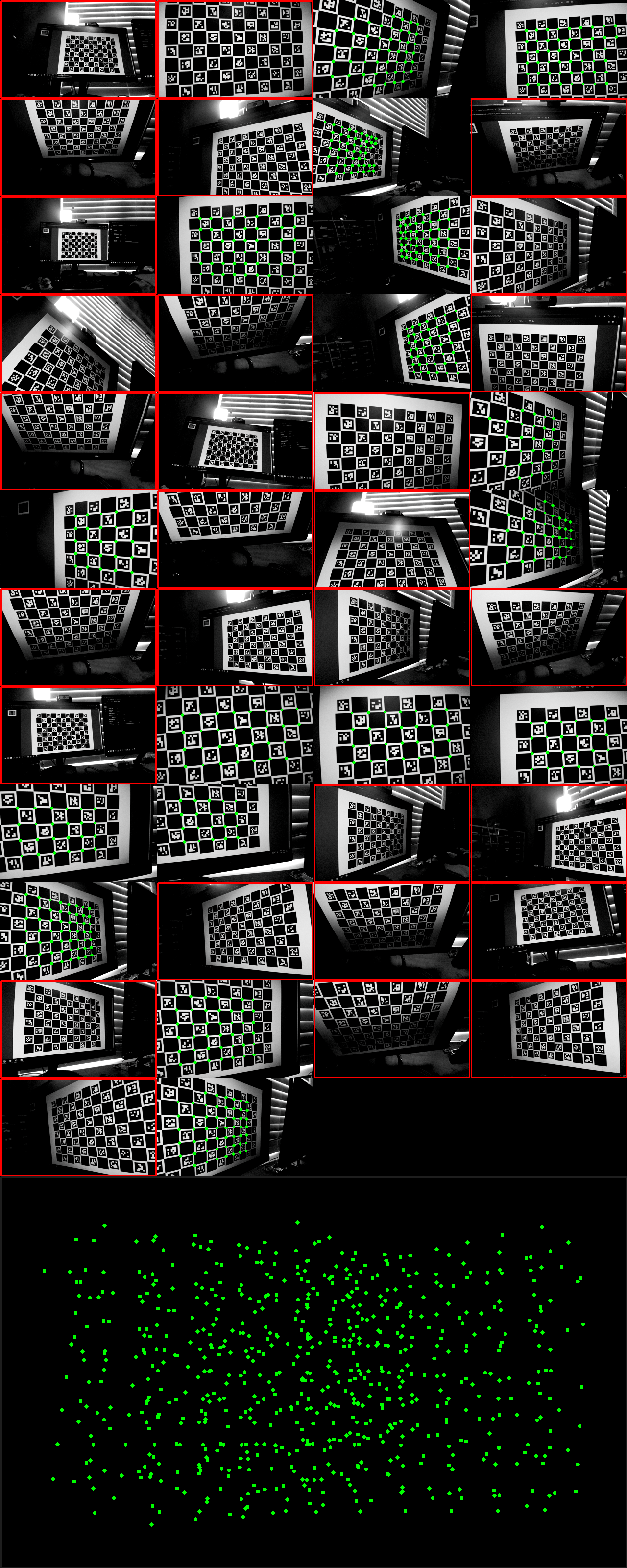
فسيفساء المعايرة
- في السابق، كان من الصعب تحديد جودة صور المعايرة
- تحتوي علامة التبويب المعايرة الآن على زر "تنزيل فسيفساء المعايرة". ستظهر لك الفسيفساء بالضبط ما تساهم به كل صورة في معايرتك.
منطقة استهداف "المركز"
- تمت إضافة وضع استهداف المركز إلى علامة التبويب "الإخراج" لتحسين تتبع الكائنات باستخدام خطوط أنابيب الألوان
إزاحة ثلاثية الأبعاد ديناميكية (NT: fiducial_offset_set)
- أصبح من الممكن الآن ضبط الإزاحة ثلاثية الأبعاد دون تغيير خطوط الأنابيب. هذا مفيد للحالات التي تحتاج فيها "نقطة التصويب" إلى التغيير بناءً على المسافة أو الخصائص الأخرى.
إضافة دعم Modbus
- يحتوي نظام التشغيل Limelight الآن على خادم modbus دائم التشغيل للفحص والخدمات اللوجستية والتطبيقات الصناعية
- راجع مواصفات سجل modbus هنا: https://docs.limelightvision.io/docs/docs-limelight/apis/modbus
- يمكن تغيير منفذ خادم modbus الافتراضي في علامة التبويب إعدادات واجهة المستخدم
- من خلال modbus وخطوط أنابيب snapscript python، يتم الآن دعم تطبيقات الرؤية المخصصة بالكامل مع الاتصال ثنائي الاتجاه.
خادم NT مخصص
- تحتوي علامة التبويب الإعدادات الآن على إدخال لخادم NT مخصص.
- هذا يمكّن سير عمل جديد يتضمن خادم NT زجاجي يعمل على جهاز كمبيوتر شخصي، و Limelight 3G يتواصل عبر USB.
تغييرات Rawfiducial
- أصبحت قيمة "المساحة" للعلامات المرجعية الخام الآن قيمة معايرة ومطبعة تتراوح من ~0-1
جميع تغييرات NetworkTables و JSON
-
إضافة NT getpipetype - الحصول على سلسلة نوع خط الأنابيب الحالي (مثل pipe_color، pipe_fiducial)
-
إضافة NT tcclass - اسم الفئة المكتشفة لخط أنابيب المصنف
-
إضافة NT tdclass - اسم الفئة المكتشفة لخط أنابيب الكاشف
-
إضافة NT t2d للاستهداف ثنائي الأبعاد المضمون ذريًا - [صالح، عدد الأهداف، تأخير الهدف، تأخير الالتقاط، tx، ty، txnc، tync، ta، معرف الهدف، معرف المصنف، معرف الكاشف، tlong، tshort، thor، tvert، ts(انحراف)]
-
إزالة NT tlong و tshort و thor و tvert و ts
-
إضافة مصفوفة NT 'crosshairs' [cx0،cy0،cx1،cy1]
-
إزالة NT cx0 و cy0 و cx1 و cy1
-
إضافة NT rawbarcodes - مصفوفة سلاسل NT لبيانات الباركود. حتى 32 إدخالاً.
-
تسمح جميع المصفوفات "الخام" بما يصل إلى 32 هدفًا (ارتفاع من 8)
-
إضافة fiducial_offset_set لضبط الإزاحة ثل�اثية الأبعاد الديناميكية
-
إضافة "pType" إلى نتيجة المستوى الأعلى لـ json
-
إضافة "stdev_mt1" و "stdev_mt2" إلى نتيجة المستوى الأعلى لـ json (x،y،z،roll،pitch،yaw) (أمتار، درجات)
تغييرات على تنسيقات الملفات الأخرى وتفريغات JSON
- تم تبسيط تنسيق ملف المعايرة. يتم تحويل المعايرات القديمة تلقائيًا إلى التنسيق الجديد عند التحميل
- تمت إزالة طبقة واحدة من التداخل من تفريغات JSON للنتائج والحالة
إصلاحات الأخطاء
- في السابق، إذا تم فصل Google Coral أثناء نشاط خط أنابيب عصبي، كان خط الأنابيب يعود بشكل دائم إلى وضع "اللون/الارتجاعي"
- الآن، سيتم طباعة "CHECK CORAL" أو "CHECK MODEL" على الصورة. لن يتغير نوع خط الأنابيب أبدًا
- في السابق، كانت العلامات التي نجحت في المرور عبر مرشح معرف العلامة المرجعية تُرسم أحيانًا بمخطط أحمر بدلاً من مخطط أخضر. تم إصلاح هذه المشكلة في التصور.
- تملأ خطوط أنابيب Apriltag مصفوفة NT tcornxy
- تحترم خطوط أنابيب Apriltag الآن شريط تمرير المساحة الدنيا والقصوى بشكل كامل. في السابق، كانت خطوط أ
نظام Limelight OS 2024.5.0 (9/4/24)
- الترقية إلى لينكس 6.1
تحديث مجموعة الكاميرا
- تم تحديث مجموعة الكاميرا بالكامل لإصلاح مشكلة تجمد الكاميرا الطرفية على Limelight3G.
- تشمل الأعراض
- تأكد من إعادة ضبط إعدادات التعرض والكسب بعد تطبيق هذا التحديث.
التصغير الديناميكي
- يمكن للفرق الآن تعيين "fiducial_downscale_set" لتجاوز إعداد التصغير الحالي للخط الأنابيب
- 0: تحكم واجهة المستخدم، 1: 1x، 2: 1.5x، 3: 2x، 4: 3x، 5: 4x
- استخدم طريقة Helpers الجديدة مع 0.0 (تحكم واجهة المستخدم)، 1.0، 1.5، 2.0، 3.0، 4.0
- هذه عملية بدون تكلفة إضافية.
- من خلال الجمع بين التصغير الديناميكي والاقتصاص الديناميكي، يمكن للفرق تعظيم معدل الإطارات في الثانية دون إدارة خطوط أنابيب متعددة
تحسينات MegaTag2
- يعمل MT2 الآن بغض النظر عن اتجاه Limelight، بما في ذلك أوضاع "الصورة الطولية" مع دوران 90 درجة و -90 درجة
مصفوفة "rawdetections" nt
- [classID, txnc, tync, ta, corner0x, corner0y, corner1x, corner2y, corner3x, corner3y, corner4x, corner4y]
- الزوايا في مساحة البكسل دون تطبيق المعايرة
تحديث التآكل/التمدد
- تدعم خطوط أنابيب الألوان الآن ما يصل إلى 10 خطوات من التمدد و10 خطوات من التآكل
- تحتوي خطوط أنابيب الألوان الآن على خيار "عكس المورفو" لعكس ترتيب خطوات التمدد والتآكل
LimelightLib 1.6 (9/4/2024)
- إضافة void SetFiducialDownscalingOverride(float downscale)
قم بتعيينها إلى 0 للتحكم في خط الأنابيب، أو واحدة من القيم التالية لتجاوز إعداد التصغير في خط الأنابيب الخاص بك: 1, 1.5, 2, 3, 4
- إضافة RawFiducial[] GetRawFiducials()
- إضافة RawDetection[] GetRawDetections()
نظام التشغيل Limelight 2024.4.0 (3/4/24)
شكراً لجميع الفرق التي ساهمت بأفكار لهذا التحديث.
Megatag 2
Megatag 2 هو محدد موقع خالٍ من الغموض. يتمتع بدقة أعلى وضبط أدق من Megatag1، وتم بناؤه وفقاً للمتطلبات التالية:
- القضاء على مشكلة غموض الوضعية وزيادة المتانة ضد ضوضاء الصورة/الزوايا.
- توفير تقديرات ممتازة للوضعية بناءً على علامة واحدة أو أكثر، بغض النظر عن المنظور.
- زيادة المتانة ضد عدم الدقة في وضع AprilTag المادي.
- تقليل مقدار الترشيح الجانبي للروبوت اللازم للحصول على نتائج تقدير وضعية جيدة.
لاحظ الفرق بين MegaTag2 (الروبوت الأحمر) و Megatag (الروبوت الأزرق) في هذه الحالة ذات العلامة الواحدة شديدة الغموض:
يتطلب Megatag2 منك تعيين اتجاه الروبوت باستخدام استدعاء طريقة جديدة. إليك مثال كامل:
LimelightHelpers.SetRobotOrientation("limelight", m_poseEstimator.getEstimatedPosition().getRotation().getDegrees(), 0, 0, 0, 0, 0);
LimelightHelpers.PoseEstimate mt2 = LimelightHelpers.getBotPoseEstimate_wpiBlue_MegaTag2("limelight");
if(Math.abs(m_gyro.getRate()) > 720) // إذا كانت سرعتنا الزاوية أكبر من 720 درجة في الثانية، تجاهل تحديثات الرؤية
{
doRejectUpdate = true;
}
if(mt2.tagCount == 0)
{
doRejectUpdate = true;
}
if(!doRejectUpdate)
{
m_poseEstimator.setVisionMeasurementStdDevs(VecBuilder.fill(.6,.6,9999999));
m_poseEstimator.addVisionMeasurement(
mt2.pose,
mt2.timestampSeconds);
}
يوفر Megatag2 نتائج م�متازة وخالية من الغموض على أي مسافة بناءً على علامة واحدة. هذا يعني أنه من الممكن تماماً التركيز فقط على العلامات ذات الصلة والتي تقع ضمن تفاوت الوضع المرغوب. إذا كانت العلامة ليست في الموقع الصحيح أو غير ذات صلة، قم بتصفيتها باستخدام ميزة التصفية الديناميكية الجديدة.
تصفية Apriltag الديناميكية
- نظراً لأن MegaTag2 لا يحتاج بشدة إلى تجميع أكبر عدد ممكن من علامات AprilTag، يمكنك بأمان تصفية العلامات الموضوعة جيداً وذات الصلة:
int[] validIDs = {3,4};
LimelightHelpers.SetFiducialIDFiltersOverride("limelight", validIDs);
الانتقال إلى MegaTag2
يتطلب Megatag2 اتجاه الروبوت الخاص بك للعمل بشكل صحيح. اتجاه 0 درجة، 360 درجة، 720 درجة، إلخ يعني أن روبوتك يواجه جدار التحالف الأحمر. هذه هي نفس الاتفاقية المستخدمة في PathPlanner و Chorero و Botpose و Botpose_wpiblue.
بمجرد إضافة SetRobotOrientation() إلى الكود الخاص بك، تحقق من المصور ثلاثي الأبعاد المدمج. على المدى القريب، يجب أن يتطابق Megatag2 و Megatag1 بشكل وثيق إن لم يكن تماماً. على المدى البعيد، يجب أن يكون Megatag 2 (الروبوت الأحمر) أكثر دقة واستقراراً من Megatag1 (الروبوت الأزرق).
بمجرد أن يظهر المصور المدمج نتائج جيدة، يمكنك استخدام Megatag2 بأمان لتوجيه روبوتك خلال الفترة التلقائية.
الفلتر الوحيد الذي نوصي بإضافته هو فلتر "السرعة الزاوية القصوى". قد تجد أنه عند السرعات الزاوية العالية، تصبح تقديرات الوضعية الخاصة بك أقل موثوقية قليلاً.
يحتوي مستودع الأمثلة على مثال Megatag2 مع هذا الفلتر.
if(Math.abs(m_gyro.getRate()) > 720) // إذا كانت سرعتنا الزاوية أكبر من 720 درجة في الثانية، تجاهل تحديثات الرؤية
{
doRejectUpdate = true;
}
if(mt2.tagCount == 0)
{
doRejectUpdate = true;
}
LimelightLib 1.5 (4/3/24)
إضافة
getBotPoseEstimate_wpiRed_MegaTag2()
getBotPoseEstimate_wpiBlue_MegaTag2()
SetRobotOrientation()
نظام التشغيل Limelight الإصدار 2024.3.4 (20/3/24)
شكراً لجميع الفرق التي ساهمت بأفكار لهذا التحديث.
حل العلامة الفردية عالي الدقة
تم تحسين حل العلامة الفردية ثلاثية الأبعاد في MegaTag. أصبح أكثر استقراراً بكثير من ذي قبل على المدى الطويل.
تعطيل JSON افتراضياً (تغيير جذري)
- تم تعطيل JSON افتراضياً لتقليل استخدام النطاق الترددي وعبر جميع الفرق التي تستخدم لوحات المعلومات ذاتية الاشتراك مثل Shuffleboard.
- يجب أن يقلل هذا أيضاً من حمل NT واستخدام وحدة المعالجة المركزية في RoboRIO.
- أعد تمكين json لكل خط معالجة في علامة التبويب الخاصة بالإخراج.
- يتضمن هذا التحديث تغييرات يجب أن تسمح لمزيد من الفرق بالانتقال بعيداً عن JSON لتقدير الوضعية.
المساحة غير المشوهة (تغيير جذري)
يتم إزالة التشوه من الزوايا قبل حساب مساحة أي هدف.
تضمين مقاييس لكل علامة مرجعية في botpose و botpose_wpiblue و botpose_wpired
[tx, ty, tz, roll, pitch, yaw, tagCount, tagSpan (بالأمتار), averageDistance (بالأمتار), averageArea (نسبة مئوية من الصورة), (tags)]
لكل علامة يستخدمها تحديد الموقع في megatag، تتضمن المصفوفات أعلاه الآن (tagID, txnc, tync, ta, distanceToCamera, distanceToRobot, ambiguity)
الغموض هو مقياس جديد يتراوح من 0 إلى 1 يشير إلى غموض المنظور الحالي للعلامة. يجب على الأرجح رفض التحديثات ذات العلامة الفردية التي تحتوي على غموض > 0.9.
مصفوفات "rawtargets" و "rawfiducials" في nt (تغيير جذري)
- rawtargets - (txnc,tync,ta) لكل هدف
- rawfiducials - (tagID, txnc, tync, ta, distanceToCamera, distanceToRobot, ambiguity) لكل هدف
- تمت إزالة إدخالات NT السابقة لـ rawtargets (tx0,ty0، إلخ).
إصلاحات الأخطاء
- تصفير جميع معلومات العلامة الفردية ثلاثية الأبعاد إذا لم يتم العثور على priorityID. سابقاً، كان يتم تصفير Tx و Ta و Ty و Tv فقط عندما لم يتم العثور على priorityTag
- تصفير botpose إذا كانت العلامة الوحيدة المرئية قد تمت تصفيتها بواسطة ميزات "مرشحات المعرف" في واجهة المستخدم. سابقاً، كانت botposes تعيد التعيين إلى مركز الملعب بدلاً من (0,0,0) إذا كانت العلامة الوحيدة المرئية هي علامة مصفاة
- كان الإصدار 2024.2 ينشر NANs في بعض إدخالات networktables في بعض الحالات النادرة. لن يحدث هذا بعد الآن.
LimelightLib 1.4 (21/3/24)
- إضافة دعم لـ Raw Fiducials في الإصدار 2024.3.4. تتضمن PoseEstimates الآن مصفوفة من rawFiducials التي تحتوي على id، txnc، tync، ta، distanceToCamera، distanceToRobot، و ambiguity
مدير أجهزة Limelight الإصدار 1.4 (18/3/2024)
إصلاح الخلل
تم اكتشاف أن أجهزة Limelight المتصلة عبر USB يتم عرضها بشكل صحيح كإدخال واحد بدلاً من إدخالين جزئيين.
نظام التشغيل Limelight إصدار 2024.2.2 (17/3/2024)
إصلاح الخلل
TX و TY تحترم الآن علامة التصويب بشكل صحيح في إدخالات NT.
نظام Limelight OS 2024.2 (8/3/2024)
استهداف بدون تقاطع الخطوط باستخدام Json (tx_nocross، ty_nocross) و NT (txnc، tync)
إذا كنت تستخدم استهداف tx/ty مع معايرة جوهرية مخصصة، فمن المحتمل أنك لا تزال ترى اختلافًا من كاميرا إلى أخرى لأن تقاطع خطوط Limelight غير متوافق مع البكسل الرئيسي للكاميرا. يمكن للفرق التي تتطلب دقة أكبر في tx/ty إما تكوين تقاطع الخطوط ليتطابق مع البكسل الرئيسي، أو استخدام هذه المقاييس الجديدة.
تغيير محتمل قد يؤثر على tx/ty
تم إدخال خطأ في وقت سابق من هذا الموسم أدى إلى كسر المعايرة المخصصة خصيصًا لـ tx و ty و tx + ty في json. كان نظام Limelight OS يعود إلى المعايرات الافتراضية في العديد من الحالات.
ترقيات المعايرة
أصبحت المعايرة الآن شبه فورية، بغض النظر عن عدد الصور التي تم التقاطها. لقد قمنا أيضًا بإصلاح عطل ناتج عن وجود أكثر من حوالي 30 صورة في ظروف معينة.
نحصل باستمرار على خطأ إعادة إسقاط يبلغ حوالي 1 بكسل مع 15-20 صورة للأهداف الورقية، وخطأ 0.3 بكسل مع أهداف calib.io عالية الجودة الخاصة بنا.
إصلاح واجهة مستخدم فلاتر Fiducial
يقبل مربع نص فلتر Fiducial الآن أي عدد من الفلاتر.
متفرقات
يستخدم مولد Apriltag الآن إعداد "بدون حدود" افتراضيًا لمنع التحجيم مع علامات 165.1 مم.
نظام التشغيل Limelight إصدار 2024.1.1 (24/2/2024)
- إصلاح priorityID
نظام Limelight OS 2024.1 (24/2/2024)
مقاييس الأجهزة (مفتاح hw في networktables، طلب GET /status)
- يمكن للفرق الآن تسجيل معدل الإطارات في الثانية، وحمل وحدة المعالجة المركزية، واستخدام ذاكرة الوصول العشوائي، ودرجة حرارة وحدة المعالجة المركزية.
- يعالج https://github.com/LimelightVision/limelight-feedback/issues/5
تحسين المعايرة
- إصلاح الانهيار الذي قد يحدث إذا احتوت صورة المعايرة على اكتشاف صالح واحد بالضبط. تحسين تغذية راجعة واجهة المستخدم على الويب.
تحسين تحديد موقع الروبوت (عدد العلامات والمزيد)
-
تتضمن الآن جميع مصفوفات networktables لـ botpose (botpose و botpose_wpiblue و botpose_wpired) عدد العلامات، وامتداد العلامات (بالأمتار)، ومتوسط المسافة (بالأمتار)، ومتوسط المساحة (النسبة المئوية من الصورة)
-
يتم حساب هذه المقاييس باستخدام العلامات المدرجة في خريطة الميدان المحملة. لن تؤثر علامات AprilTag المخصصة و/أو المتنقلة على هذه المقاييس.
-
مع معايرة الجهاز وهذا التحديث لمصفوفة botpose، لا ن�عتقد أن JSON ضروري لغالبية حالات الاستخدام هذا العام.
-
يتضمن الآن تفريغ JSON botpose_avgarea و botpose_avgdist و botpose_span و botpose_tagcount للراحة.
[tx,ty,tz,rx,ry,rz,latency,tagcount,tagspan,avgdist,avgarea]
ميزة جديدة: معرف الأولوية (مفتاح NT priorityid)
-
إذا كان روبوتك يستخدم كلاً من الميزات المعتمدة على قياس المسافة والميزات المعتمدة على tx/ty، فربما واجهت مشكلة تجربة المستخدم التالية:
-
قبل هذا التحديث، لم تكن هناك طريقة سهلة لتبديل معرف العلامة المفضل لاستهداف tx/ty.
-
في حين أن هناك مرشح معرف في واجهة المستخدم، فإنه
- ليس ديناميكيًا
- يزيل العلامات من تحديد الموقع megaTag.
-
هذا يعني أن الفرق كانت تنشئ عدة خطوط أنابيب: واحدة لتحديد الموقع ثلاثي الأبعاد، وواحدة لكل علامة tx/ty (خط أنابيب واحد للتصويب من الجانب الأزرق مع العلامة 7، وواحد للتضخيم من الجانب الأزرق مع العلامة 6، وما إلى ذلك).
-
تتيح ميزة معرف الأولوية الجديدة (مفتاح NT priorityid) إخبار Limelight الخاص بك "بعد اكتمال جميع عمليات اكتشاف العلامات وتصفيتها وفرزها، ركز على العلامة التي تطابق معرف الأولوية."
-
هذا لا يؤثر على تحديد الموقع بأي شكل من الأشكال، وهو يغير فقط بشكل طفيف ترتيب العلامات في نتائج JSON.
-
إذا لم يكن معرف الأولوية الخاص بك -1، فسيعيد tx/ty/ta القيمة 0 ما لم تكن العلامة المختارة مرئية.
متفرقات
- إصلاح علامة "x" عبر الشاشة أثناء استخدام وضع الهدف المزدوج في خط أنابيب apriltag ثلاثي الأبعاد
- توسيع واجهة برمجة التطبيقات REST مع تحميلات تسميات الشبكة العصبية (/uploadlabels)
- تضمين الاسم المستعار للجهاز في json الحالة /status
LimelightLib 1.3
- تم تحديث LimelightLib (Java و CPP) لجعل تحديد الموقع أسهل من أي وقت مضى.
LimelightHelpers.PoseEstimate limelightMeasurement = LimelightHelpers.getBotPoseEstimate_wpiBlue("limelight");
if(limelightMeasurement.tagCount >= 2)
{
m_poseEstimator.setVisionMeasurementStdDevs(VecBuilder.fill(.7,.7,9999999));
m_poseEstimator.addVisionMeasurement(
limelightMeasurement.pose,
limelightMeasurement.timestampSeconds);
}
موارد جديدة للفرق
تتبع التعليقات والمشكلات لـ Limelight: https://github.com/LimelightVision/limelight-feedback/issues
مستودع الأمثلة: https://github.com/LimelightVision/limelight-examples
مثال التصويب والتحديد المدى مع Swerve: https://docs.limelightvision.io/docs/docs-limelight/tutorials/tutorial-swerve-aiming-and-ranging
مثال تحديد الموقع باستخدام MegaTag: https://docs.limelightvision.io/docs/docs-limelight/tutorials/tutorial-swerve-pose-estimation
شكراً للمساهمين الأخيرين jasondaming و Gold876 و JosephTLockwood و Andrew Gasser و virtuald
تحد�يثات Limelight 2024 (6/2/24)
ترقية وثائق Limelight
- تمت إعادة كتابة الوثائق لتبسيط عملية الإعداد
مولد AprilTag من Limelight
- يتميز الموقع https://tools.limelightvision.io/ الآن بأول مولد AprilTag على الإنترنت.
- اختر حجم الورق وحجم العلامة ومعرفات العلامات لإنشاء ملف PDF قابل للطباعة.
- قد لا يعرض متصفح Safari العلامات بشكل صحيح في الوقت الحالي.
منشئ خريطة Limelight
- https://tools.limelightvision.io/map-builder
- يمكنك الآن بناء خرائط AprilTag مخصصة باستخدام واجهة مستخدم بديهية.
- تم تحديث العائلة الافتراضية وحجم العلامة لتتناسب مع ساحة 2024.
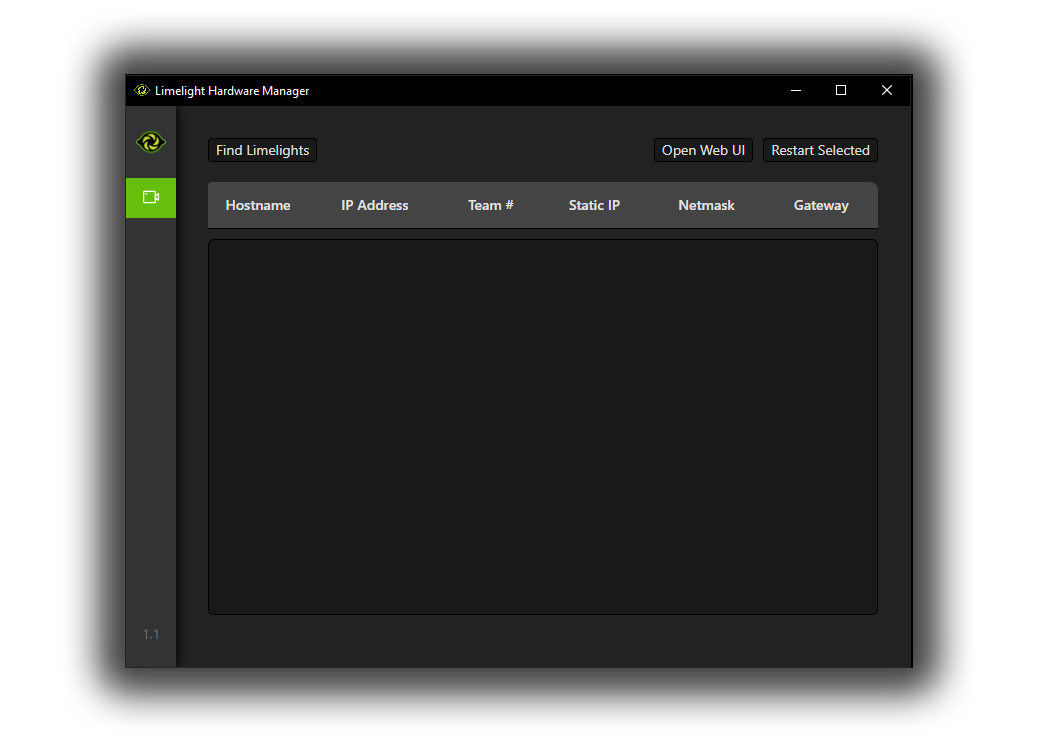
مدير الأجهزة الجديد
- أداة الباحث أصبحت الآن مدير أجهزة Limelight
- تمت إعادة كتابتها من الصفر. وهي الآن تكتشف أجهزة Limelight بشكل موثوق، وتوفر معلومات تشخيصية أكثر فائدة، ولا تتطلب إعادة التشغيل لتعمل بشكل صحيح.
- احصل عليها الآن من صفحة التنزيلات
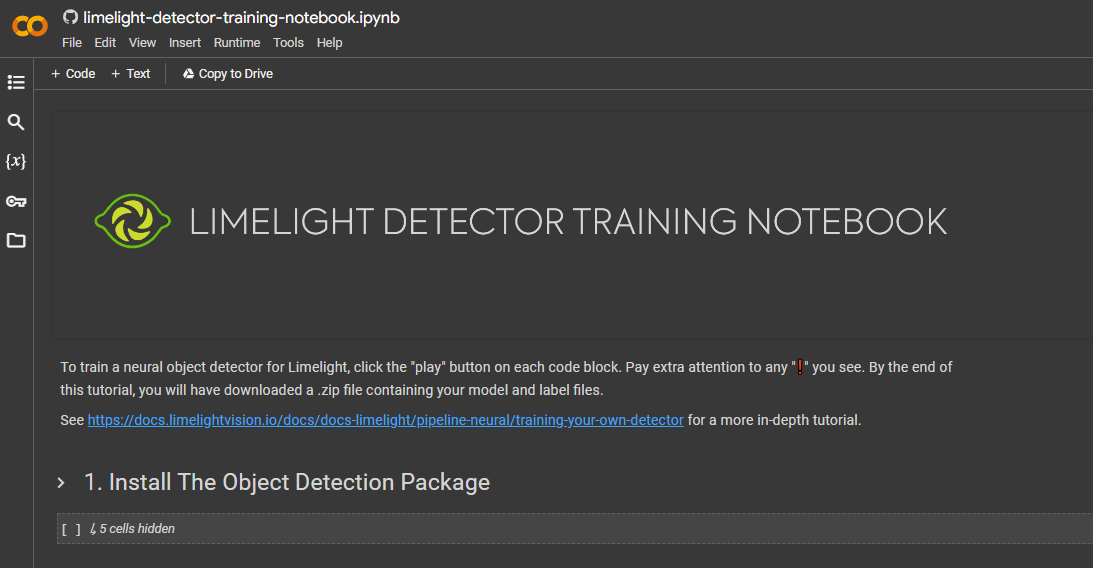
تدريب الشبكات العصبية الخاصة بك
- يمكنك تدريب نماذج الكشف الخاصة بك مجانًا باستخدام RoboFlow، ودفتر تدريب كاشف Limelight، بالإضافة إلى الدليل التعليمي الجديد الخاص بنا
خريطة AprilTag وكاشف الملاحظات لعام 2024
- تمت إضافة نموذج الخريطة والكاشف إلى صفحة التنزيلات وأحدث صورة نظام تشغيل Limelight.
نظام Limelight OS 2024.0 (6/2/24)
إصلاحات معايرة ChArUco
- تم زيادة دقة الكشف الفرعية للبكسل في كاشف ChArUco لدينا. أصبح من الممكن الآن تحقيق خطأ إعادة إسقاط يتراوح بين 1-2 بكسل باستخدام أهداف لوحة الحافظة و20 صورة.
- باستخدام نفس الكاميرا ونفس الهدف، حقق إصدار 2023.6 خطأ إعادة إسقاط قدره 20 بكسل، بينما حقق إصدار 2024.0 خطأ إعادة إسقاط قدره 1.14 بكسل.
- لم تعد حقول الإدخال تقبل الحروف والأحرف الخاصة. هذا يلغي احتمالية حدوث انهيار.
تحسين دقة Megatag خارج الصندوق
- قبل هذا التحديث، كان مولد خريطة Megatag الداخلي في Limelight يشير إلى شريط تمرير حجم العلامة في واجهة المستخدم بدلاً من أحجام العلامات المقدمة من ملف .fmap.
- يحترم Megatag الآن أحجام العلامات المكونة في ملفات fmap ويتجاهل شريط تمرير الحجم.
- إذا لم يتم ضبط شريط تمرير الحجم الخاص بك على 165.1 مم، فستلاحظ تحسنًا فوريًا في دقة التموضع.
ترقيات الأداء وإصلاحات الأخطاء
- خطوط معالجة AprilTag بمعدل إطارات في الثانية أعلى
- تم تحسين أداء العارض المكاني للحقل بشكل كبير.
إصلاحات الأخطاء
- كانت علامات Apriltag في العارضات ثلاثية الأبعاد تُرسم أحيانًا بصور علامات غير صحيحة أو تالفة. يتم الآن عرض العلامات بشكل صحيح دائمًا.
- ستعيد "v" / tv / "valid" الآن "1" فقط إذا كانت هناك اكتشافات صالحة. في السابق، كانت tv دائمًا "1".
2023.6 (18/04/23)
معايرة ChArUco السهلة ومصورات المعايرة
- تعتبر معايرة ChArUco أفضل من معايرة لوحة الشطرنج لأنها تتعامل مع الحجب والكشف السيئ للزوايا، ولا تتطلب رؤية اللوحة بأكملها. هذا يجعل من السهل جدًا التقاط زوايا لوحة المعايرة بالقرب من حواف وزوايا الصور. هذا أمر بالغ الأهمية لتقدير معامل التشويه.
- توفر عملية معايرة Limelight تغذية راجعة في كل خطوة، وستضمن قيامك بكل ما هو ضروري للحصول على نتائج معايرة جيدة. تم بذل الكثير من الجهد لجعل هذه العملية محكمة قدر الإمكان.
- الأهم من ذلك، يمكنك تصور نتائج المعايرة الخاصة بك بجانب المعايرة الافتراضية. بنظرة واحدة، يمكنك فهم ما إذا كانت نتيجة المعايرة الخاصة بك معقولة أم لا.
- يمكنك أيضًا استخدام لوحة المعايرة كأداة تعليمية. يمكنك تعديل ملفات نتائج المعايرة التي تم تنزيلها وإعادة تحميلها لمعرفة كيف تؤثر مصفوف�ة الخصائص الداخلية ومعاملات التشويه على نتائج الاستهداف ومجال الرؤية وما إلى ذلك.
- ألق نظرة على هذا الفيديو:
2023.5.1 و 2023.5.2 (22/3/23)
-
تم إصلاح الخلل الذي تم إدخاله في 2023.5.0 - بينما أصلح الإصدار 2023.5 ميزة megatag لجميع التخطيطات غير المستوية، إلا أنه قلل من أداء تقديرات وضعية العلامة الفردية. تم إصلاح هذا الأمر. تستخدم تقديرات وضعية العلامة الفردية نفس الحل المستخدم في الإصدار 2023.4 بالضبط.
-
واجهة لقطات أكثر استجابة. تحميل شبكة اللقطات الآن صور مصغرة بدقة منخفضة 128 بكسل.
-
يتم الآن عرض انحراف Limelight بشكل صحيح في العارضات ثلاثية الأبعاد. وهو إيجابي في اتجاه عكس عقارب الساعة في العارض وداخليًا.
-
الإشارة إلى الأهداف التي يتم تتبعها حاليًا في عارض مساحة الميدان.
2023.5.0 (21/3/23)
تغييرات جذرية
- تم إصلاح خلل - كان "الانحراف" في مساحة الروبوت Limelight معكوسًا في الإصدارات السابقة. أصبح انحراف Limelight في واجهة المستخدم الويب الآن موجبًا في عكس اتجاه عقارب الساعة داخليًا.
تحديث اختيار المنطقة
- يعمل اختيار المنطقة الآن كما هو متوقع في خطوط أنابيب الكشف العصبي.
- تمت إضافة 5 خيارات منطقة جديدة لاختيار الوسط أو الأعلى أو اليسار أو اليمين أو الأعلى أو الأسفل من مستطيل الهدف غير المدور.
واجهة برمجة التطبيقات REST "hwreport"
- سيعيد :5807/hwreport استجابة JSON تفصل معلومات الخصائص الداخلية للكاميرا والتشويه
إصلاح MegaTag
- كانت بعض تخطيطات علامات april غير المستوية معطلة في MegaTag. تم إصلاح هذا، وأصبح تقدير الوضع مستقرًا الآن مع جميع علامات الميدان. هذا يمكّن من تقدير وضع مستقر على مسافات أكبر من ذي قبل.
دقة أكبر لـ tx و ty
- أصبحت TX و TY أكثر دقة من أي وقت مضى. يتم إزالة التشويه بالكامل عن الأهداف، ويتم تحديد مجال الرؤية بالكامل من خلال الخصائص الداخلية للكاميرا.
2023.4.0 (18/2/23)
فلتر فئات الكاشف العصبي
حدد الفئات التي تريد تتبعها لتصفية سهلة للاكتشافات غير المرغوب فيها.
دعم موسع للكاشف العصبي
دعم أي دقة إدخال، ودعم أشكال إخراج إضافية لدعم هندسات كشف الأشياء الأخرى. أصبحت النماذج المعتمدة على EfficientDet0 مدعومة الآن.
2023.3.1 (14/2/23)
تحسينات دقة AprilTag
تم تحسين مصفوفة العوامل الداخلية وبشكل أهم، تم تحسين معاملات التشويه لجميع النماذج. تحسينات ملحوظة في تحديد موقع AprilTag الفردي.
تحميل الكاشف
تم إصلاح تحميل الكاشف.
2023.3 (13/02/23)
زمن الالتقاط (مفتاح NT: "cl"، نتائج JSON: "cl")
يمثل إدخال زمن الالتقاط الجديد الوقت بين نهاية تعريض الصف الأوسط لمستشعر صورة Limelight وبداية خط المعالجة.
عتبة جودة جديدة لعلامات AprilTags
أصبح من السهل الآن تصفية علامات AprilTags الزائفة باستخدام شريط تمرير عتبة الجودة الجديد. يجب أن تزيل القيمة الافتراضية المعينة في 2023.3 معظم الاكتشافات الزائفة.
تجاوز وضعية الكاميرا في فضاء الروبوت (مفاتيح NT: "camerapose_robotspace_set"، "camerapose_robotspace")
يمكن الآن ضبط موضع Limelight الخاص بك في فضاء الروبوت أثناء التشغيل. إذا تم تعيين المفتاح إلى مصفوفة من الأصفار، يتم استخدام الوضعية المحددة في واجهة الويب.
إليك مثال على Limelight على مصعد:

زيادة الحد الأقصى للتعريض
أصبح الحد الأقصى لوقت التعريض الآن 33 مللي ثانية (بدلاً من 12.5 مللي ثانية). لا تزال أوضاع الالتقاط عالية الإطارات في الثانية محدودة بـ (1/fps) ثانية. على سبيل المثال، لن يكون لخطوط المعالجة بسرعة 90 هرتز صور أكثر سطوعًا بعد وقت تعريض 11 مللي ثانية.
تحديثات وضعية الروبوت
تحتوي جميع مصفوفات وضعية الروبوت الثلاث في جداول الشبكة على إدخال سابع يمثل إجمالي زمن الاستجابة (زمن الالتقاط + زمن الاستهداف).
إصلاحات الأخطاء
- إصلاح بث MJPEG لـ LL3 في لوحة التحكم
- إصلاح وضع الكاميرا - يُنتج وضع السائق الآن صورًا ساطعة وقابلة للاستخدام
- تم تصحيح تسمية التعريض - كل "علامة" تمثل 0.01 مللي ثانية وليس 0.1 مللي ثانية
- إصلاح تحميل كاشف الشبكة العصبية
2023.2 (28/1/23)
جعل التصميم ثلاثي الأبعاد أسهل من أي وقت مضى.
وضعيات الروبوت المتوافقة مع WPILib
أصبح استخدام وضعية الروبوت أسهل من أي وقت مضى خارج الصندوق.
هذه تتطابق مع أنظمة إحداثيات WPILib. 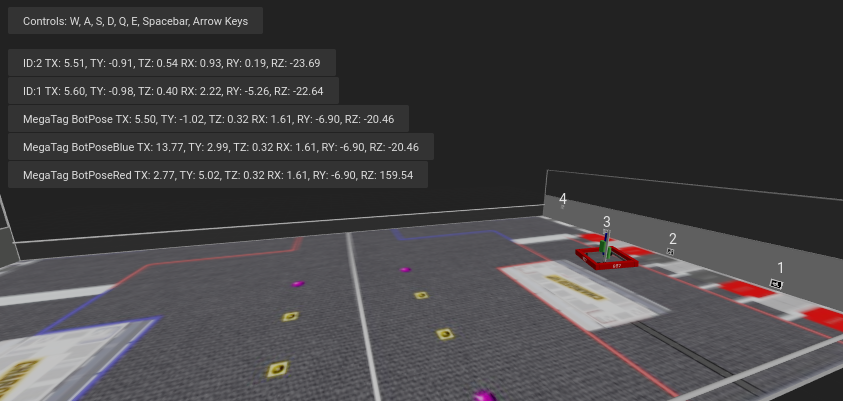
يتم عرض جميع وضعيات الروبوت مباشرة في مصور الفضاء الميداني في واجهة الويب، مما يجعل من السهل التأكد بنظرة سريعة أن كل شيء يعمل بشكل صحيح.
وصول أسهل إلى البيانات ثلاثية الأبعاد (تغييرات جذرية)
تعتبر وضعية الروبوت في فضاء الهدف من أكثر البيانات فائدة الناتجة عن Limelight فيما يتعلق بعلامات AprilTag. باستخدام هذا وحده، يمكنك محاذاة نظام القيادة بشكل مثالي مع علامة AprilTag على الميدان.
- مفتاح NetworkTables "campose" أصبح الآن "camerapose_targetspace"
- مفتاح NetworkTables "targetpose" أصبح الآن "targetpose_cameraspace"
- مفتاح NetworkTables جديد - "targetpose_robotspace"
- مفتاح NetworkTables جديد - "botpose_targetspace"
تحميل الشبكة العصبية
قم بتحميل نماذج الآلة القابلة للتعليم إلى خط أنابيب تصنيف Limelight. تأكد من أنها نماذج متوافقة مع Tensorflow Lite EdgeTPU. قم بتحميل ملفات .tflite وملفات التسميات .txt بشكل منفصل.
2023.1 (19/1/23)
ميجاتاج وتحسينات الأداء
تصحيح خطأ
تم تصحيح معلمة حجم العلامة الافتراضية في واجهة المستخدم إلى 152.4 مم (بدلاً من 203.2 مم). كان هذا هو سبب معظم مشاكل الدقة.
زيادة استقرار التتبع
هناك عدة طرق لضبط اكتشاف وفك تشفير AprilTag. لقد حسّنا الاستقرار بشكل عام، خاصة في البيئات ذات الإضاءة المنخفضة / التعرض المنخفض.
تحويل للرمادي فائق السرعة
أصبح التحويل للرمادي أسرع بـ 3 إلى 6 مرات من ذي قبل. سترى الفرق دائمًا تدفقًا للفيديو بالرمادي أثناء تتبع AprilTags.
القص لتحسين الأداء
تحتوي خطوط أنابيب AprilTag الآن على شرائط تمرير للقص. سيؤدي قص الصورة إلى تحسين معدلات الإطارات بأي دقة.
تصفية أسهل
يوجد الآن حقل "تصفية المعرف" واحد في خطوط أنابيب AprilTag والذي يقوم بتصفية مخرجات JSON والعلامات الممكّنة لـ botpose والعلامات الممكّنة لـ tx/ty. كان إعداد التصفية المزدوج مليئًا بالأخطاء ومربكًا.
تغيير جذري
مفتاح NT "camtran" أصبح الآن "campose"
تحديث JSON
"botpose" هو الآن جزء من نتائج تفريغ json
تحديث مصور الفضاء الميداني
يعرض مصور الفضاء الميداني الآن ميدان FRC 2023. يجب أن يكون من الأسهل الآن الحكم على دقة botpose بنظرة سريعة.
Limelight MegaTag (botpose الجديد)
كانت أولويتي الأولى هي إعادة كتابة botpose لزيادة الدقة وتقليل الضوضاء وتحسين مقاومة الغموض. تنفيذ botpose الجديد من Limelight يسمى MegaTag. بدلاً من حساب botpose بمتوسط بسيط للعديد من الأوضاع الفردية في الفضاء الميداني، يقوم MegaTag بدمج جميع العلامات في علامة ثلاثية الأبعاد ضخمة واحدة مع العديد من النقاط الرئيسية. هذا له فوائد هائلة.
يوضح GIF التالي موقفًا مصممًا لإحداث انقلاب العلامة: الأسطوانة الخضراء: وضع الروبوت الفردي لكل علامة الأسطوانة الزرقاء: BotPose 2023.0.1 الأسطوانة البيضاء: MegaTag Botpose الجديد
لاحظ كيف أن botpose الجديد (الأسطوانة البيضاء) مستقر للغاية مقارنة بـ botpose القديم (الأسطوانة الزرقاء). يمكنك مشاهدة قيم tx و ty أيضًا.
هنا الشاشة الكاملة، توضح غموض العلامة:
هذه هي المزايا:
Botpose الآن مقاوم للغموض (انقلاب العلامة) إذا كان هناك أكثر من علامة واحدة مرئية (ما لم تكن قريبة ومستوية. من الناحية المثالية، لا تكون النقاط الرئيسية مستوية). Botpose الآن أكثر مقاومة للضوضاء في زوايا العلامة إذا كان هناك أكثر من علامة واحدة مرئية. كلما كانت العلامات أبعد عن بعضها البعض، كان ذلك أفضل. هذا لا يقتصر على العلامات المستوية. إنه يتوسع لأي عدد من العلامات في الأبعاد الثلاثية الكاملة وبأي اتجاه. ستعمل علامات الأرضية وعلامات السقف بشكل مثالي.
إليك رسم توضيحي يوضح جانبًا واحدًا من كيفية عمل هذا مع حالة مستوية بسيطة. النتائج في الواقع أفضل مما هو موضح، حيث تم تطبيق خطأ كبير على ثلاث نقاط بدلاً من نقطة واحدة في MegaTag الموضح. مع زيادة حجم MegaTag ثلاثي الأبعاد المدمج وعدد النقاط الرئيسية، يزداد استقراره.
يتم تأجيل تحميل الشبكة العصبية إلى 2023.2!
2023.0.0 و 2023.0.1 (1/11/23)
تقديم AprilTags، تحديد موقع الروبوت، الشبكات العصبية العميقة، واجهة لقطات الشاشة المعاد كتابتها، والمزيد.
الميزات والتغييرات وإصلاحات الأخطاء
- خط أنابيب التقاط الاستشعار الجديد والتحكم في الكسب
- يسمح خط الأنابيب الجديد بأوقات تعرض أقصر 100 مرة مما كانت عليه في 2022. كما يمكّن خط الأنابيب الجديد من التحكم في الكسب. هذا مهم للغاية لتتبع AprilTags، وسيعمل على جعل الاستهداف العاكس أكثر موثوقية من أي وقت مضى. قبل نظام Limelight OS 2023، كان كسب مستشعر Limelight غير محدد (قمنا بتنفيذ بعض الحيل لجعله يعمل على أي حال).
- باستخدام شريط التمرير "كسب المستشعر" الجديد، يمكن للفرق جعل الصور أكثر إعتاماً أو سطوعاً من أي وقت مضى دون لمس شريط تمرير التعرض. زيادة الكسب ستزيد من الضوضاء في الصورة.
- من خلال الجمع بين الكسب المنخفض وأوقات التعرض الجديدة الأقل، أصبح من الممكن الآن إنتاج صور سوداء تقريباً بالكامل مع مصابيح LED كاملة السطوع والأهداف العاكسة. سيساعد هذا في التخفيف من انعكاسات LED وضوء الشمس أثناء تتبع الأهداف العاكسة.
- من خلال زيادة كسب المستشعر وتقليل التعرض، ستتمكن الفرق من تقليل آثار الضبابية الناتجة عن الحركة بسبب أوقات التعرض العالية أثناء تتبع AprilTags.
- لقد نجحنا في تطوير خط الأنابيب الجديد هذا مع الاحتفاظ بجميع الميزات - 90 إطارًا في الثانية، التكبير الأجهزة، إلخ.
- المزيد من خيارات الدقة
- هناك دقتان جديدتان للالتقاط لـ LL1 و LL2 و LL2+: 640x480x90fps و 1280x960x22fps
- واجهة الويب المحسنة
- ستقوم واجهة المستخدم الرسومية للويب الآن بالتحميل والتهيئة بسرعة تصل إلى 3 أضعاف على شبكات الروبوت.
- واجهة لقطات الشاشة المعاد كتابتها
- تمت إعادة كتابة ميزة لقطات الشاشة بالكامل للسماح بتحميل الصور وتنزيلها وحذفها. هناك أيضًا واجهات برمجة تطبيقات جديدة لالتقاط لقطات الشاشة مفصلة في الوثائق.
- تحسينات SolvePnP
- كان لدى ميزة تحديد موقع الكاميرا المستندة إلى solvePnP خطأ مزعج كان يحد بشكل خطير من دقتها كل أربعة إطارات. تمت معالجة هذا، وتم بناء لوحة ثلاثية الأبعاد جديدة بالكامل لتصورات SolvePNP العاكسة/الملونة.
- إصلاح خطأ في واجهة الويب
- كانت هناك مشكلة نادرة للغاية في 2022 تسببت في تعطل واجهة الويب بشكل دائم أثناء التمهيد الأول بعد الفلاش، مما كان يجبر المستخدم على إعادة الفلاش. تم العثور على السبب الجذري وإصلاحه نهائيًا.
- واجهات برمجة التطبيقات الجديدة
- تتضمن Limelight الآن واجهات برمجة تطبيقات REST و Websocket. تدعم واجهات برمجة تطبيقات REST و Websocket و NetworkTables جميعها ميزة تفريغ JSON الجديدة، والتي تسرد جميع البيانات لجميع الأهداف بتنسيق قابل للقراءة البشرية وسهل التحليل لـ FRC وجميع التطبيقات الأخرى.
الرؤية المستندة إلى التعلم بدون كود ودعم Google Coral
- يتم الآن دعم Google Coral من قبل جميع نماذج Limelight. Google Coral هو مسرع أجهزة USB بقوة 4TOPs (تريليونات العمليات / ثانية) مصمم خصيصًا للاستدلال على الشبكات العصبية 8 بت.
- تمامًا مثل التتبع العاكس قبل بضع سنوات، كان حاجز الدخول للرؤية المستندة إلى التعلم على روبوتات FRC مرتفعًا جدًا بحيث لا يمكن للفريق العادي حتى محاولة ذلك. لقد طورنا كل البنية التحتية المطلوبة لجعل الرؤية المستندة إلى التعلم سهلة مثل الأهداف العاكسة مع Limelight.
- لدينا مجموعة GPU سحابية، وبرامج نصية للتدريب، وأداة تجميع مجموعات البيانات، وفريق تسمية بشري جاهز للانطلاق. نحن متحمسون لجلب الشبكات العصبية العميقة إلى مجتمع FRC لأول مرة.
- نحن ندعم حاليًا نوعين من النماذج: نماذج اكتشاف الكائنات ونماذج تصنيف الصور.
- ستوفر نماذج اكتشاف الكائنات "معرفات الفئات" والمربعات المحيطة (تمامًا مثل أهدافنا العاكسة) لجميع الكائنات المكتشفة. هذا مثالي لتتبع قطع اللعبة في الوقت الفعلي.
- يرجى المساهمة في أول نموذج اكتشاف كائنات FRC من خلال إرسال الصور هنا: https://datasets.limelightvision.io/frc2023
- استخدم مفاتيح tx و ty و ta و tclass في NetworkTables أو تفريغ JSON لاستخدام شبكات الاكتشاف
- ستقوم نماذج تصنيف الصور باستيعاب صورة وإنتاج تسمية فئة واحدة.
- لمعرفة المزيد والبدء في تدريب النماذج الخاصة بك لـ Limelight، تحقق من Teachable Machine من Google.
- https://www.youtube.com/watch?v=T2qQGqZxkD0
- نماذج Teachable Machine متوافقة مباشرة مع Limelight.
- يمكن استخدام مصنفات الصور لتصنيف حالة الروبوت الداخلية، وحالة ميزات الحقل، والكثير غير ذلك.
- استخدم مفتاح tclass في NetworkTables لاستخدام هذه النماذج.
- ستوفر نماذج اكتشاف الكائنات "معرفات الفئات" والمربعات المحيطة (تمامًا مثل أهدافنا العاكسة) لجميع الكائنات المكتشفة. هذا مثالي لتتبع قطع اللعبة في الوقت الفعلي.
- لا يوفر نظام Limelight OS 2023.0 القدرة على تحميل نماذج مخصصة. سيتم تمكين هذا قريبًا في 2023.1
دعم AprilTag بدون كود
- AprilTags سهلة مثل الأهداف العاكسة مع Limelight. نظرًا لأنها تحتوي على مرشح صعب طبيعي في شكل معرف، فهناك سبب أقل لجعل roboRIO الخاص بك يقوم بأي ترشيح متعلق بالرؤية.
- للبدء، استخدم tx و ty و ta كالمعتاد. لا يلزم إجراء أي تغييرات في الكود. قم بالفرز حسب أي خاصية للهدف، واستخدم مجموعات الأهداف، وما إلى ذلك.
- نظرًا لأن AprilTags دائمًا مربعة ودائمًا قابلة للتعريف بشكل فريد، فإنها توفر المنصة المثالية لحسابات الوضع ثلاثية الأبعاد الكاملة.
- كانت ردود الفعل التي تلقيناها بشأن هذه الميزة في قنوات الدعم الخاصة بنا إيجابية للغاية. لقد جعلنا AprilTags سهلة قدر الإمكان، من التتبع ثنائي الأبعاد إلى تحديد موقع الروبوت ثلاثي الأبعاد الكامل في الميدان
- راجع مواصفات خريطة الميدان ووثيقة نظام الإحداثيات للحصول على معلومات أكثر تفصيلاً.
- هناك أربع طرق لاستخدام AprilTags مع Limelight:
- AprilTags ثنائية الأبعاد
- استخدم tx و ty و ta. قم بتكوين خطوط الأنابيب الخاصة بك للبحث عن معرف علامة محدد.
<gif>
- نقطة الاهتمام ثلاثية الأبعاد AprilTags
- استخدم مفاتيح tx و ty و ta و tid في NetworkTables. إزاحة نقطة الاهتمام هي كل ما ستحتاجه معظم الفرق لتتبع الأهداف التي لا تحتوي مباشرة على AprilTags مرفقة بها.
<gif>
- ثلاثي الأبعاد الكامل
- تتبع LL الخاص بك أو الروبوت الخاص بك أو العلامات بالكامل في 3D. استخدم campose أو json لسحب البيانات ذات الصلة إلى roboRio الخاص بك.
<gif>
- تحديد موقع الروبوت في مساحة الميدان
- أخبر Limelight الخاص بك كيف تم تركيبه، وقم بتحميل خريطة الميدان، وسيوفر LL الخاص بك وضعية الميدان للروبوت الخاص بك للاستخدام مع مقدر الوضع WPILib.
- يضع نظام إحداثيات الميدان الخاص بنا (0،0) في مركز الميدان بدلاً من الزاوية.
- استخدم مفتاح botpose في NetworkTables لهذه الميزة.
<gif>
2022.3.0 (13/4/22)
إصلاحات للأخطاء ونبضات القلب.
إصلاحات الأخطاء
- إصلاح مشاكل الأداء واستقرار البث وتأخير البث المتعلقة ببث كاميرا USB وحالات البث المتعددة.
الميزات والتغييرات
- مفتاح NetworkTable لنبضات القلب "hb"
- تزداد قيمة "hb" مرة واحدة لكل إطار معالجة، وتعيد التعيين إلى صفر عند 2000000000.
2022.2.3 (16/3/22)
إصلاحات للأخطاء وتصفية القص من خلال كود الروبوت.
إصلاحات الأخطاء
- إصلاح مفتاح "stream" في networktables وأوضاع الصورة داخل الصورة
- إصلاح مفتاح "snapshot" في networktables. يجب على المستخدمين تعيين مفتاح "snapshot" إلى "0" قبل تعيينه إلى "1" لالتقاط لقطة شاشة.
- إزالة التنبيهات الزائدة المتعلقة بـ Python من واجهة الويب
الميزات والتغييرات
- تصفية القص اليدوي
- باستخدام مصفوفة "crop" في networktables، يمكن للفرق الآن التحكم في مستطيلات القص من خلال كود الروبوت.
- لكي يعمل مفتاح "crop"، يجب أن تستخدم الـ pipeline الحالية مستطيل القص الافتراضي واسع الفتح (-1 لـ minX و minY، +1 لـ maxX و +1 maxY).
- بالإضافة إلى ذلك، يجب أن تحتوي مصفوفة "crop" في networktable على 4 قيم بالضبط، ويجب أن تكون واحدة على الأقل من هذه القيم غير صفرية.
2022.2.2 (23/2/22)
ترقية إلزامية لجميع الفرق بناءً على اختبارات الأسبوع 0 واختبارات موثوقية نظام إدارة الميدان (FMS).
إصلاحات الأخطاء
- إصلاح التعليق / فقدان الاتصال / فقدان الاستهداف المتعلق بواجهات الويب المفتوحة، ونظام إدارة الميدان (FMS)، والإعدادات المشابهة لنظام إدارة الميدان، وأجهزة العرض المتعددة وما إلى ذلك.
الميزات والتغييرات
-
تصفية الاقتصاص
- تجاهل جميع البكسلات خارج مستطيل الاقتصاص المحدد
- إذا كان لدى عجلة الطيران الخاصة بك أي نقاط مميزة في الميدان، يمكنك استخدام مرشح الاقتصاص لتجاهل الغالبية العظمى من البكسلات في خطوط المعالجة المحددة. يجب أن تساعد هذه الميزة الفرق على تقليل احتمالية تتبع الأهداف غير المقصودة.
- إذا كنت تتتبع الشحنة، استخدم هذه الميزة للبحث عن الشحنة فقط داخل جزء محدد من الصورة. فكر في تجاهل مصدات فريقك والأهداف البعيدة وما إلى ذلك.
-
ميزة الزوايا الآن متوافقة مع التجميع الذكي للأهداف
- هذه الميزة مخصصة للفرق التي ترغب في إجراء رؤية مخصصة أكثر تقدمًا على RIO
- تم زيادة حد الزوايا "tcornxy" إلى 64 زاوية
- تعمل ميزات تبسيط المحيط والإجبار على التحدب بشكل صحيح الآن مع التجميع الذكي للأهداف وإرسال الزوايا
-
تم زيادة الحد الأقصى لمرشح IQR إلى 3.0
-
تم تخفيض معدل تحديث الهدف المباشر لواجهة الويب من 30 إطارًا في الثانية إلى 15 إطارًا في الثانية لتقليل عرض النطاق الترددي وحمل وحدة المعالجة المركزية أثناء فتح واجهة الويب
2022.1 (25/01/22)
إصلاحات الأخطاء
- حصلنا على معلومات من أحد موردينا حول مشكلة (وحل!) تؤثر على حوالي 1/75 من وحدات المعالجة المركزية المستخدمة تحديدًا في Limelight 2 (قد تكون مرتبطة بدفعة معينة). هذا منطقي، وكان أحد الاختلافات القليلة المتبقية في التمهيد بين صورة 2022 وصورة 2020.
- إصلاح أزرار التحميل لمدخلات GRIP ونماذج SolvePNP
الميزات
-
قوس قزح تدرج اللون
- يسهل قوس قزح تدرج اللون الجديد تكوين عتبة تدرج اللون.
-
عكس تدرج اللون
- تعد ميزة عكس تدرج اللون الجديدة ميزة حاسمة إذا كنت ترغب في تتبع الأجسام الحمراء، حيث أن اللون الأحمر موجود في بداية ونهاية نطاق تدرج اللون:
-
مكتبات Python جديدة
- تمت إضافة scipy و scikit-image و pywavelets و pillow و pyserial إلى صندوق الرمل الخاص بـ Python.
2022.0 و 2022.0.3 (15/1/22)
هذا تحديث كبير. فيما يلي التغييرات الرئيسية الأربعة:
الميزات
-
تجميع الأهداف الذكي
- تجميع الأهداف تلقائيًا التي تجتاز جميع مرشحات الأهداف الفردية.
- سيقوم بتجميع أي عدد من الأهداف ديناميكيًا بين -الحد الأدنى لشريط تمرير حجم المجموعة- و -الحد الأقصى لشريط تمرير حجم المجموعة-
-
رفض القيم الشاذة
- بينما هذا الهدف أكثر تحديًا من الأهداف الأخرى، إلا أنه يمنحنا المزيد من الفرص للتصفية. من الناحية المفاهيمية، هذا الهدف أكثر من مجرد "كتلة خضراء". بما أننا نعلم أن الهدف يتكون من أهداف متعددة قريبة من بعضها البعض، يمكننا في الواقع رفض الأهداف الشاذة التي تقف بمفردها.
- يجب أن تعتمد بشكل شبه كامل على التصفية الجيدة للأهداف القياسية لهدف هذا العام، واستخدم رفض القيم الشاذة فقط إذا رأيت أو توقعت وجود قيم شاذة زائفة في بث الكاميرا الخاص بك. إذا كان لدي�ك تصفية ضعيفة للأهداف القياسية، فقد يبدأ اكتشاف القيم الشاذة في العمل ضدك!
-
تحسينات صورة Limelight 2022 لقد أزلنا مئات الأجزاء المتحركة من برنامجنا. هذه هي النتائج:
- حجم الصورة المضغوطة: 1.3 جيجابايت في 2020 → 76 ميجابايت لعام 2022 (انخفض بمعامل 17!)
- وقت التنزيل: عشرات الدقائق في 2020 → ثوانٍ لعام 2022
- وقت الفلاش: 5+ دقائق في 2020 → ثوانٍ لعام 2022
- وقت التمهيد: 35+ ثانية في 2020 → 14 ثانية لعام 2022 (10 ثوانٍ حتى تشغيل المؤشرات الضوئية)
-
البرمجة النصية الكاملة بلغة Python
- نجح Limelight في تعريض عدد كبير من الطلاب لبعض إمكانيات الرؤية الحاسوبية في الروبوتات. مع البرمجة النصية بلغة Python، يمكن للفرق الآن اتخاذ خطوة أخرى إلى الأمام من خلال كتابة خطوط أنابيب معالجة الصور الخاصة بهم.
-
هذا التحديث متوافق مع جميع أجهزة Limelight، بما في ذلك Limelight 1.
-
المشكلات المعروفة: استخدام التكبير الأجهزة مع Python سينتج عنه نتائج غير متوقعة.
-
يعيد الإصدار 2022.0.3 بث GRIP 5802، ويعالج مشاكل التمهيد على بعض وحدات LL2 عن طريق التراجع عن بعض تحسينات وقت التمهيد. تم زيادة وقت التمهيد إلى 16 ثانية.
2020.4 (3/11/20)
2020.4 هو تحديث حاسم آخر يقضي على الانهيار المتقطع الذي يستمر من 2 إلى 4 ثوانٍ والذي قد يحدث أثناء انقطاع مفاجئ لتدفق mjpeg. غالبًا ما كان هذا يحدث في نهاية المباراة تمامًا، وفي بعض الحالات قد يحدث أثناء المباريات.
2020.3 (25/2/20)
2020.3 هو تحديث حاسم يعالج إعادة تشغيل البرنامج المتقطعة المتعلقة بالشبكة، ويعالج الانهيار الذي كان يحدث عند فصل كاميرا USB.
2020.2 (30/1/20)
يدفع الإصدار 2020.2 أجهزة Limelight إلى أبعد من ذلك من خلال إضافة القدرة على التحريك والتكبير إلى أي نقطة. كما يضيف وضع فيديو جديد تمامًا وإصلاحات مهمة للأخطاء. أخبرنا ما هي الميزات التي ترغب في رؤيتها في التحديثات المستقبلية!
الميزات
-
تكبير الأجهزة 3x بمعدل 60 إطارًا في الثانية
- أضاف تحديثنا الأخير تكبير الأجهزة 2x لجميع طرازات Limelight دون أي تكلفة على الإطلاق. لقد تمكنا من دفع تكبير أجهزتنا إلى أبعد من ذلك مع تكبير الأجهزة 3x. جميع طرازات Limelight قادرة الآن على تكبير الأجهزة 3x بمعدل 60 إطارًا في الثانية. هذا يجعل التتبع الكامل للملعب أسهل لكل فريق.
-
التحريك الأفقي للأجهزة
- قد تجد الروبوتات القادرة على التصويب من مسافات طويلة وقصيرة في عام 2020 صعوبة في استخدام تكبير الأجهزة على أجهزة Limelight الخاصة بها دون استخدام حامل Limelight نشط وقابل للتعديل. لقد قمنا بدمج التحريك الأفقي للأجهزة لحل هذه المشكلة.
إصلاحات الأخطاء
- معالجة مشكلات برامج التشغيل التي كانت تعطل أشرطة تمرير توازن الألوان
- إعادة جميع برامج التشغيل المتعلقة بالشبكات إلى متغيرات موسم 2019 لمعالجة عدد صغير من تقارير أداء الشبكة من الفرق
2020.1 (16/1/20)
يضيف الإصدار 2020.1 واحدة من أروع ميزات Limelight حتى الآن: التكبير الأجهزة 2x. هذا ليس تكبيرًا رقميًا، وهو متاح الآن لجميع إصدارات Limelight.
الميزات
-
التكبير الأجهزة 2x
- ليس تكبيرًا رقميًا
- قم بتمكين التكبير الأجهزة 2x لتحقيق تتبع محسّن بشكل كبير على المدى الطويل، وتتبع مستقر على مسافات الملعب الكامل.
- تأتي هذه الميزة بدون أي تكلفة للتأخير أو معدل الإطارات - يستمر التتبع في التنفيذ بمعدل 90 إطارًا في الثانية دون أي عبء إضافي.
-
الشعرات المتقاطعة اليدوية
- ضبط مواقع الشعرات المتقاطعة الفردية والمزدوجة يدويًا باستخدام أشرطة التمرير في واجهة الويب
-
ميزات SolvePNP / ثلاثية الأبعاد الجديدة (لا تزال تجريبية)
- لقد أضفنا خيار "فرض المحدب" لاستخدام النقاط الخارجية فقط للهدف - وهذا ضروري في عام 2020 بسبب الشريط الرفيع المستخدم للهدف السداسي.
- تمت إضافة خيار "ربط الهدف". تربط هذه الميزة "tx" و "ty" بالهدف ثلاثي الأبعاد. هذا مطلوب لتوجيه الروبوتات للتسجيل باستخدام الأهداف ثلاثية الأبعاد.
- أخيرًا، أضف خيار "إزاحة الهدف على المحور Z" لإزاحة موقع الهدف المطلوب تلقائيًا ف�ي الفضاء ثلاثي الأبعاد على المحور Z.
- في Infinite Recharge، سيتم استخدام "إزاحة الهدف على المحور Z" لتتبع مركز الهدف الدائري الصغير خلف الهدف السداسي.
-
استشعار اللون باستخدام "tc"
- اقرأ المصفوفة الجديدة "tc" في Network Tables للحصول على قيم الأحمر والأخضر والأزرق في موقع الشعرة المتقاطعة. اضبط "توازن الأزرق" و "توازن الأحمر" في علامة التبويب المدخلات لتحقيق استشعار مثالي للألوان.
إصلاحات الأخطاء
- تم إصلاح وظائف كاميرا USB المعطلة في 2020.0 الآن في 2020.1
- تم إصلاح وظائف SolvePnP المعطلة في 2020.0 الآن في 2020.1
- يستخدم SolvePnP الآن مركز النموذج بشكل صحيح كمركز لتصور المحور
2019.7 (4/5/19)
يضيف الإصدار 2019.7 ميزتين جديدتين.
الميزات
- بث بدقة 160×120 بمعدل 30 إطارًا في الثانية
- بث أكثر سلاسة وبنطاق ترددي أقل للفرق التي تستخدم كاميرات USB واسعة الزاوية. انخفض النطاق الترددي لبث الكاميرا بزاوية 180 درجة من حوالي 3.7 ميجابت في الثانية إلى حوالي 1.8 ميجابت في الثانية.
- قم بتغيير دقة البث في علامة التبويب الإعدادات.
- تغيير دقة البث على جهاز Limelight مع كاميرا USB واسعة الزاوية متصلة. بدون صورة داخل صورة، ومعدل بث عادي.
- الرفض الذكي للبقع
- كان على الفرق التي قامت بتركيب كاميراتها على نفس خط الهدف هذا العام التعامل مع انعكاسات LED غير مرغوب فيها.
- شريط تمرير المساحة لا يحل دائمًا هذه المشكلة، حيث ترغب الفرق في تتبع أهداف الرؤية الصغيرة على مسافات كبيرة.
- ستقوم هذه الميزة الجديدة تلقائيًا برفض المحيطات الصغيرة نسبيًا التي مرت عبر جميع المرشحات الأخرى.
- مع ابتعاد الروبوت عن هدف الرؤية (مما يقلل حجمه)، سيقوم الرفض الذكي للبقع تلقائيًا بالتعديل لرفض المحيطات الصغيرة نسبيًا فقط.
التغييرات
- تلميحات الأدوات
- أصبحت تلميحات الأدوات متاحة �الآن على بعض عناصر التحكم في Limelight
2019.6.1 إصلاح عاجل (14/3/19)
2019.6.1 يصلح عمليات رفع Grip.
2019.6 (12/3/19)
الإصدار 2019.6 يركز كليًا على الموثوقية.
إصلاحات الأخطاء
- كاميرات USB
- معالجة مشكلة قد تتسبب في فشل بعض كاميرات USB عند التمهيد.
- نظام إدارة الميدان (FMS)
- جعل Limelight أكثر مقاومة (إن لم يكن بشكل كامل) لإعادة تشغيل FMS وتغييرات شبكة الميدان / الكمبيوتر المحمول.
- لن يتوقف Limelight بعد الآن بعد تغيير مفاجئ في شبكة العميل.
- فرز المحيطات الخام (تغيير جذري)
- لم تعد مرشحات التقاطع تؤثر على فرز المحيطات الخام.
- النشر التلقائي على Smartdashboard
- يقوم LL بنشر بعض المعلومات تلقائيًا على SmartDashboard (عنوان IP، عنوان URL للواجهة، إلخ). تحتوي أسماء هذه القيم الآن على اسم المضيف.
الميزات والتغييرات
- زيادة كبيرة في دقة واستقرار ميزة compute3d. قياسات الترجمة والدوران مستقرة على مسافات أكبر.
- تمت زيادة الحد الأقصى لإزاحة المستوى الأسود إلى 40 (من 25) للحصول على صور أكثر إعتامًا.
- خيارات فرز جديدة "الأقرب" في علامة التبويب "الإخراج" أثناء تمكين وضع "التقاطع المزدوج".
- قياسي - تنفيذ الفرز "الأقرب" الحالي مع وضع "التقاطع المزدوج".
- قياسي V2 - تنفيذ فرز "الأقرب" ذكي وتجريبي مع وضع "التقاطع المزدوج".
- متوسط التقاطعات - أصل الفرز "الأقرب" مع وضع "التقاطع المزدوج" هو متوسط التقاطعين.
- التقاطع A - أصل الفرز "الأقرب" مع وضع "التقاطع المزدوج" هو التقاطع A.
- التقاطع B - أصل الفرز "الأقرب" مع وضع "التقاطع المزدوج" هو التقاطع B.
- خيارات جديدة لوضع LED في خط الأنابيب: "النصف الأيسر"، "النصف الأيمن"
- قيم زوايا خام بفاصلة عائمة أثناء تمكين compute3D.
- إخفاء زخارف الصورة أثناء استخدام العصي السحرية
- تدفق أكبر في واجهة الويب
2019.5 (2/9/19)
مع إصدار 2019.5، نقدم ميزة تحديد موقع الكاميرا compute3D الجديدة تمامًا. حاول عدد قليل فقط من الفرق إضافة هذه الميزة إلى أنظمة الرؤية الخاصة بهم، والآن أصبحت متاحة لجميع مستخدمي Limelight 1 و Limelight 2.
هذه ليست حلاً سحريًا للعبة هذا العام. نوصي بشدة بالتفكير في طرق إبداعية لاستخدام التتبع القياسي عالي السرعة بمعدل 90 إطارًا في الثانية ما لم تكن هذه الميزة ضرورية للغاية.
الميزات
- وضع الدقة العالية و PnP
- في الصورة المتحركة التالية، تم وضع Limelight 2 على بعد 37 بوصة خلف الهدف و 14.5 بوصة إلى يمينه.
- تم تدوير Limelight لاحقًا باليد. لاحظ كيف تظل المسافات ثابتة إلى حد كبير.
- مع إصدار 2019.4، قدمنا إرسال الزوايا. سمح هذا للفرق المتقدمة بكتابة خوارزمياتها الخاصة باستخدام solvePNP() من OpenCV. مع إصدار 2019.5، يتم كل هذا على متن الجهاز.
- قم بتحميل ملف csv نصي بسيط يحتوي على نموذج للهدف الخاص بك. لدينا نماذج مسبقة الصنع لأهداف 2019 مستضافة على موقعنا. يجب أن تحتوي جميع النماذج على أصل متمركز، واستخدام ترتيب النقاط عكس اتجاه عقارب الساعة مع مقياس البوصة.
- قم بتمكين الوضع الجديد عالي الدقة 960x720، ثم قم بتمكين "Solve 3D" للحصول على موضع ودوران Limelight بالنسبة للهدف الخاص بك.
- يتم الآن عرض أرقام الزوايا على الصورة لتسهيل إنشاء النموذج وضبط العتبة.
- اقرأ جميع الأبعاد الستة لتحويل الكاميرا (x,y,z,pitch,yaw,roll) عن طريق قراءة مصفوفة الأرقام "camtran" في networktable.
- مستوى الأسود
- مع شريط تمرير مستوى الأسود الجديد، أصبح تحديد العتبة أسهل. قم بزيادة إزاحة مستوى الأسود لتعتيم صورك بشكل أكبر.
تغييرات جذرية
- تم إصلاح مجال الرؤية العمودي المبلغ عنه لـ LL2 ليتطابق مع القيمة المدرجة وهي 49.7 درجة. سيؤدي هذا إلى تغيير قيم "ty" الخاصة بك
إصلاحات الأخطاء
- إصلاح الانهيار الذي قد يحدث عند البث فقط عند توصيل كاميرات USB ذات عدسة عين السمكة.
- إصلاح التعليق النادر الناجم عن برنامج تشغيل متعلق بالشبكة.
- تقريب الزوايا نشط الآن دائمًا.
2019.4 (26/1/19)
نعتقد أن جميع تقارير الأخطاء الحرجة قد تمت تغطيتها في هذا الإصدار.
الميزات
- الزوايا
- أرسل زوايا الهدف الخاص بك كمصفوفتين (tcornx, tcorny) *الآن tcornxy عن طريق تمكين "إرسال الزوايا" في علامة التبويب "الإخراج". سيتيح هذا المزيد من الإمكانيات للفرق المهتمة بخطوط الأنابيب المتقدمة مع طرق مثل solvePNP().
- اضبط تقريب الزوايا باستخدام شريط التمرير "تقريب الزوايا" في علامة التبويب "الإخراج".
إصلاح الأخطاء
- إصلاح التعليق + الانهيار النادر الذي كان يحدث عندما كان لهدفين نفس المساحة تمامًا، أو نفس إحداثي x، أو نفس إحداثي y.
- إصلاح حساب المساحة في أوضاع الهدف الثنائي والثلاثي.
- تحسين فرز الكونتور لأداء أفضل.
2019.3 (19/1/19)
يعالج الإصدار 2019.3 عددًا من الأخطاء وطلبات الميزات.
الميزات
- معدل البث (تقليل عرض النطاق الترددي)
- قم بتعيين معدل البث إلى "منخفض" في صفحة الإعدادات للحصول على بث فيديو بمعدل 15 إطارًا في الثانية وعرض نطاق ترددي أقل.
- تعطيل المحيطات الخام في NetworkTables (تقليل عرض النطاق الترددي)
- تم تعطيل المحيطات الخام افتراضيًا الآن. سيؤدي هذا إلى تقليل عرض النطاق الترددي الإجمالي لـ Limelight بشكل أكبر.
- هناك الآن حوالي 180 إدخالاً أقل في networktables يتم إرسالها في الثانية بشكل افتراضي.
- راجع خيار خط الأنابيب الجديد "المحيطات الخام" في علامة التبويب "الإخراج" لإعادة تمكين المحيطات الخام.
- مؤشر خط الأنابيب النشط
- اقرأ مفتاح networktable "getpipe" للحصول على مؤشر خط الأنابيب النشط الحقيقي للكاميرا. يتم تحديث هذا بمعدل 90 هرتز.
- يتم الآن كتابة مؤشر خط الأنابيب النشط على بث الفيديو أسفل عرض معدل الإطارات في الثانية.
- مرشحات التقاطع اليسرى واليمنى
- يمكن للفرق الآن الاختيار بين مرشحات التقاطع المزدوجة "اليسرى" و"اليمنى". تمت إضافة مرشحات التقاطع "فوق" و"تحت" في الإصدار 2019.2.
إصلاحات الأخطاء
- إصلاح خطأ بث لوحة التحكم LabView الذي تم تقديمه في الإصدار 2019.2
- لم تعد صفحة الويب تطلب خطوط الأيقونات من الإنترنت. يتم تخزين جميع الخطوط محليًا. يجب أن يؤدي هذا إلى تسريع تحميل الواجهة.
- تقليل التعرض في "وضع السائق".
- إصلاح تنفيذ "تحويل المسافة" في GRIP
- إصلاح تأخيرات الاتصال التي تستغرق 20 ثانية والتي تسببها تغيير اسم المضيف.
2019.2 (1/7/19)
يضيف الإصدار 2019.2 ميزات جديدة لتجهيز الفرق بشكل أفضل لموسم 2019.
- فلتر التقاطع
- فلتر الاتجاه
تغييرات وإصلاحات إضافية
- يتم نشر عنوان IP تلقائيًا على SmartDashboard/Shuffleboard لتسهيل استكشاف الأخطاء وإصلاحها في الفعاليات. لم نتلق تقريبًا أي تقارير عن وجود مشكلة في هذا الأمر، ولكن هذا يعمل كميزة احتياطية إضافية.
- يتم نشر اسم خط الأنابيب تلقائيًا على SmartDashboard/Shuffleboard
- الوصول إلى عرض وارتفاع المربع المحيط التقريبي بالبكسل باستخدام مفاتيح networktables الجديدة.
- الوصول إلى أطول جانب وأقصر جانب للمربع المحيط المثالي بالبكسل باستخدام مفاتيح networktables الجديدة.
- يتم الآن تطبيق "وضع الفرز" على الكونتورات المزدوجة
- تم إصلاح "وضع الفرز" الآن
- تدفق 5802 أقل إرهاقًا للكاميرا
2019.1 (18/12/18)
2019.1 يصلح جميع الأخطاء الرئيسية التي تم الإبلاغ عنها خلال فترة البيتا
- عاد الأداء إلى 90 إطارًا في الثانية بشكل ثابت. كانت مشكلة في برنامج التشغيل هي السبب الجذري لمشاكل الأداء خلال فترة البيتا
- إعدادات IP وaسم المضيف تطبق فعليًا و"تثبت"
- تمت إعادة ترتيب العصي السحرية لتتطابق مع تلك الموجودة في برنامج Limelight 2018
- نحن الآن ندعم مدخلات Grip مثل الأقنعة من خلال واجهة الويب
- تم إصلاح تجميد NetworkTables
2019.0 (10/12/18)
مع إصدار 2019، نقدم دعم GRIP، واجهة جديدة تمامًا، وإجراء تحديث أنظف.
- دعم Grip
- قم ببناء خطوط الأنابيب باستخدام GRIP لـ Limelight، وتصدير ملفات "LL Script" لتحميلها على الكاميرا الخاصة بك.
- سيتم إضافة دعم الأقنعة و NetworkTables في تحديث مستقبلي
- عرض تدفق فيديو أساسي على http://limelighturl:5802 للاختبار في grip
- واجهة ويب جديدة كليًا
- عناصر تحكم أصغر
- المزيد من التلميحات
- إضافة القدرة على إيقاف تشغيل مصابيح LED من الواجهة
- نقل مربع الاختيار المركب للعرض أسفل التدفق لتسهيل تبديل العرض
- اتصال أسرع مع Limelight. سمحت لنا تقنية الويب الجديدة بتبسيط أجزاء أخرى من الكود الخاص بنا.
- التحديث
- لقد انتقلنا إلى "Balena Etcher"
- Etcher أسرع بمرتين ويعمل على جميع المنصات
- تم إصلاح النوافذ المنبثقة للتحديث مع هذا الانتقال.
- أخرى
- تم تعديل وضع LED للسماح بأوضاع LED خاصة بخط الأنابيب
- أوقات تمهيد أسرع في وضع تعيين IP التلقائي
- تحسينات وإصلاحات طفيفة للأخطاء
2018.5 (28/3/18)
يعالج الإصدار 2018.5 مشكلة حرجة كانت تمنع المستخدمين من ضبط خطوط الأنابيب على اللقطات.
2018.4 (19/3/18)
يضيف الإصدار 2018.4 خيارات جديدة لفرز الحدود الخارجية. هذه الخيارات مهمة نسبيًا لتتبع المكعبات هذا العام، حيث لا ترغب الفرق بالضرورة في تتبع أكبر مكعب في المشهد. في كثير من الحالات، ترغب الفرق في تتبع المكعب الأقرب إلى أجهزة الالتقاط لديها. اضطر العديد من المستخدمين إلى استخدام ميزة الحدود الخارجية الخام لتنفيذ الفرز الخاص بهم، لذلك نريد أن نجعل هذا سهلاً قدر الإمكان.
الميزات
- وضع فرز الحدود الخارجية
- اختر بين خيارات الفرز "الأكبر"، "الأصغر"، "الأعلى"، "الأدنى"، "الأقصى يسارًا"، "الأقصى يمينًا"، و"الأقرب".
- نعتقد أن العديد من الفرق ستستفيد من خيار "الأقرب" لتتبع المكعبات.
2018.3 (28/02/18)
يعالج الإصدار 2018.3 خطأً رئيسيًا في إعادة اتصال جداول الشبكة والذي كان يتسبب في عدم انتشار تغييرات إعدادات NetworkTables إلى Limelight. نشكر Peter Johnson وفريق WPILib على تحديد وإصلاح الخطأ الأساسي في NT. كان هذا (على حد علمنا) آخر خطأ ذو أولوية عالية يواجه Limelight.
يجب أن تنطبق دائمًا تغييرات الإعدادات مثل ledMode و pipeline و camMode على Limelight. لم تعد بحاجة إلى حلول بديلة لتغيير إعدادات Limelight أثناء تصحيح الأخطاء، وبعد إعادة تشغيل كود الروبوت، وبعد إعادة تشغيل roborio.
التغييرات
- إصلاح مشكلة مزامنة NT الرئيسية التي أدت إلى تعطل تغييرات الإعدادات (ledMode و pipeline و camMode) أثناء تصحيح أخطاء LabView، وبعد إعادة تعيين/إعادة تشغيل roborio.
- أداة قطارة العين:
- تستخدم أداة قطارة العين نفس النافذة ذات الـ 10 وحدات للتدرج اللوني، ولكنها الآن تستخدم نافذة 30 وحدة للتشبع والقيمة. هذا يعني أن عملية العتبة غالبًا ما تكون عملية بنقرة واحدة، بدلاً من عملية متعددة الخطوات.
- اللقطات
- سيؤدي تعيين قيمة اللقطة إلى "1" إلى التقاط لقطة واحدة فقط وإعادة تعيين القيمة إلى 0. يتم تقييد اللقطات إلى لقطتين في الثانية.
- تمت زيادة حد اللقطات إلى 100 صورة.
- أصبحت منطقة محدد اللقطات قابلة للتمرير لدعم 100 صورة.
2018.2 (10/2/18)
تصحح النسخة 2018.2 جميع أخطاء البث المعروفة مع لوحات التحكم المختلفة لـ FRC. كما تجعل Limelight أسهل في الضبط وأكثر تنوعًا أثناء الفعاليات.
الميزات
- أدوات العتبة
- إعداد معلمات عتبة HSV في بضع نقرات
- أداة "تعيين" تركز معلمات HSV حول البكسل المحدد
- أداة "إضافة" تعدل معلمات HSV لتشمل البكسل المحدد
- أداة "طرح" تعدل معلمات HSV لتجاهل البكسل المحدد
- اللقطات
- تتيح اللقطات للمستخدمين حفظ ما تراه Limelight أثناء المباريات أو معايرة الفعاليات، وضبط خطوط الأنابيب أثناء البعد عن الميدان.
- احفظ لقطة باستخدام واجهة الويب، أو عن طريق نشر "1" إلى مفتاح "snapshot" في NetworkTables
- لعرض اللقطات، قم بتغيير مربع الاختيار "Image Source" في علامة التبويب "input". سيتيح لك هذا اختبار خطوط الأنابيب الخاصة بك على اللقطات بدلاً من تغذية كاميرا Limelight
- ستخزن Limelight ما يصل إلى 32 لقطة. ستقوم تلقائيًا بحذف اللقطات القديمة إذا تجاوزت هذا الحد.
- خيارات بث جديدة
- قدمنا مفتاح "stream" في NetworkTables للتحكم في وضع بث Limelight. تلقينا طلبات لأوضاع PiP (صورة داخل صورة) لتناسب بعض لوحات التحكم بشكل أفضل.
- 0 - قياسي - بث جنبًا إلى جنب إذا كانت كاميرا ويب متصلة بـ Limelight
- 1 - PiP رئيسي - يتم وضع بث الكاميرا الثانوية في الزاوية السفلية اليم�نى من بث الكاميرا الرئيسية.
- 2 - PiP ثانوي - يتم وضع بث الكاميرا الرئيسية في الزاوية السفلية اليمنى من بث الكاميرا الثانوية.
- زيادة معدل إطارات البث إلى 22 إطارًا في الثانية
- التآكل والتمدد
- تمكين ما يصل إلى تكرار واحد لكل من التآكل والتمدد.
- سيؤدي التآكل إلى تآكل طفيف لنتيجة عتبة HSV. هذا مفيد إذا كانت العديد من الكائنات تمر عبر عتبة HSV مضبوطة.
- سيؤدي التمدد إلى تضخيم طفيف لنتيجة عتبة HSV. استخدم هذا لسد الثغرات في نتائج العتبة.
- زر إعادة التشغيل
- إعادة تشغيل تتبع الرؤية لـ Limelight من واجهة الويب. هذا مفيد فقط للفرق التي تواجه مشاكل متقطعة أثناء تصحيح أخطاء كود LabView.
التحسينات
- خفض وقت تنفيذ خط الأنابيب في الحالة المستقرة إلى 3.5-4 مللي ثانية.
إصلاح الأخطاء
- إصلاح مشاكل بث Shuffleboard
- إصلاح مشاكل بث لوحة تحكم LabView
2018.1 (1/8/18)
- شريط تمرير توازن اللون الأحمر
- شريط تمرير توازن اللون الأزرق
- إعدادات أفضل لتوازن الألوان الافتراضي
- زيادة الحد الأقصى لإعداد التعرض
2018.0 (1/3/18)
بالإضافة إلى مجموعة كبيرة من دراسات الحالة الجديدة، والوثائق الأكثر تفصيلاً، وبرنامج مثال كامل لقاذف STEAMWORKS ذاتي، تلقى البرنامج ترقية رئيسية.
الميزات
- واجهة جديدة لخط أنابيب الرؤية
- أضف ما يصل إلى 10 خطوط أنابيب رؤية فريدة، كل منها مع علامات تقاطع مخصصة، وخيارات العتبة، والتعرض، وخيارات التصفية، إلخ.
- قم بتسمية كل خط أنابيب رؤية.
- حدد أي خط أنابيب كخط الأنابيب "الافتراضي".
- قم بالتبديل الفوري بين خطوط الأنابيب أثناء المباراة باستخدام قيمة NetworkTables الجديدة "pipeline". هذا مفيد للألعاب التي تحتوي على أهداف رؤية �متعددة (مثل وتد الترس والغلاية من عام 2017). هذا مفيد أيضًا للفرق التي تحتاج إلى استخدام خيارات علامات تقاطع مختلفة قليلاً لكل روبوت، أو ميدان، أو تحالف، إلخ.
- قم بتنزيل خطوط أنابيب الرؤية من Limelight للنسخ الاحتياطي أو المشاركة مع الفرق الأخرى.
- قم بتحميل خطوط أنابيب الرؤية إلى أي "فتحة" لاستخدام خطوط الأنابيب التي تم تنزيلها.
- خيار "تجميع" الهدف
- تفضيل فوري للأهداف التي تتكون من شكلين باستخدام وضع التجميع "المزدوج". خيارات "فردي" و"ثلاثي" متاحة أيضًا
- واجهة جديدة لمعايرة علامات التقاطع
- أوضاع علامات التقاطع "فردي" و"مزدوج".
- وضع "فردي" هو ما استخدمه Limelight قبل هذا التحديث. تقوم الفرق بمحاذاة روبوتاتها يدويًا، و"المعايرة" لإعادة تصفير قيم الاستهداف حول علامة التقاطع.
- وضع "مزدوج" هو ميزة متقدمة للروبوتات التي تحتاج إلى علامة تقاطع ديناميكية تتعدل تلقائيًا مع تغير مساحة الهدف / المسافة إلى الهدف. لقد استخدمنا هذه الميزة في بعض روبوتات الرماية لدينا، حيث كان بعضها يطلق النار بمنحنى طفيف. ستكون هذه الميزة مفيدة أيضًا للروبوتات ذات تركيبات Limelight غير المركزية و/أو غير المحاذاة.
- معايرة منفصلة للمحور X والمحور Y.
- إضافة مفتاح الهدف الصالح "tv" إلى Network Tables.
- إضافة مفتاح زمن استجابة الاستهداف "tl" إلى Network Tables. يقيس "tl" وقت تنفيذ خط أنابيب الرؤية. أضف 11 مللي ثانية على الأقل لوقت الالتقاط.
- رسم مستطيل إضافي للمساعدة في شرح حساب نسبة العرض إلى الارتفاع.
- إزالة ميزة التقييد، وقفل Limelight على 90 إطارًا في الثانية.
- تعطيل التركيز على معظم أزرار واجهة الويب. يصلح مشكلة سير العمل التي أبلغت عنها الفرق التي كانت تقوم بمعايرة علامات التقاطع الخاصة بها، ثم تضغط على "إدخال" لتمكين روبوتاتها.
- نشر ثلاثة محيطات "خام" وكلا علامتي التقاطع إلى Network Tables.
- الوصول إلى محيط خام باستخدام tx0, tx1, ta0, ta1، إلخ.
- الوصول إلى كلتا علامتي التقاطع الخام باستخدام cx0, cy0, cx1, cy1.
- جميع قيم x/y في مساحة الشاشة المعيارية (-1.0 إلى 1.0)
- إضافة خيار "لاحقة" إلى واجهة الويب. يسمح للمستخدمين بإضافة لاحقة إلى أسماء مضيف Limelights الخاصة بهم وNetworkTables (مثل limelight-boiler). يجب استخدام هذه الميزة فقط إذا كانت الفرق تنوي استخدام Limelights متعددة على روبوت واحد.
- عرض إصدار الصورة على واجهة الويب
التحسينات
- تقليل زمن الاستجابة المتعلق بالشبكة إلى ~0.2 مللي ثانية من ~10 مللي ثانية (شكراً لـ Thad House)
- نقل ترميز البث وضغط jpg إلى النواة الثالثة، مما يزيل تأخير 10 مللي ثانية (25 - 30 مللي ثانية تأخير مع كاميرتين) يظهر كل ستة إطارات.
- خفض وقت تنفيذ خط الأنابيب في الحالة المستقرة إلى 5 مللي ثانية مع تحسينات SIMD.
إصلاحات الأخطاء
- إصلاح عدم دقة طفيفة في قيمة المساحة التي منعت القيمة من الوصول إلى 100٪ (الحد الأقصى ~99٪).
- إصلاح إزاحة نصف بكسل في جميع حسابات الاستهداف
- إصلاح عدم ملء معلومات بث الكاميرا لخوادم NT التي بدأت بعد تسلسل تمهيد Limelight. تحديث معلومات بث الكاميرا بانتظام.
- إصلاح خطأ تسبب في "انقلاب" نسبة العرض إلى الارتفاع في بعض الأحيان.
- فرض إخراج البث القياسي (بدلاً من الإخراج المعتب) في وضع السائق.
- إصلاح خطأ منع مصابيح LED من الوميض بعد إعادة تعيين معلومات الشبكة
2017.7 (21/11/17)
- تحسين فرز الكونتور. كان يفضل الكونتورات الصغيرة على الكونتورات الأكبر.
- نظام إحداثيات جديد: المركز هو (0,0). تزداد قيمة ty عندما يتحرك الهدف "لأعلى" على المحور y، وتزداد قيمة tx عندما يتحرك الهدف "لليمين" على طول المحور x.
- حسابات زاوية أكثر دقة (نموذج الكاميرا ذات الثقب الإبري).
- عرض معلومات الاستهداف (tx, ty, ta, و ts) على صفحة الويب.
- القيم الافتراضية للاستهداف هي أصفار. هذا يعني أنه يتم إرجاع أصفار إذا لم يكن هناك هدف في مجال الرؤية.
- تخطيط جديد لصفحة الويب جنبًا إلى جنب. لا يزال ينهار إلى عمود واحد على الأجهزة الصغيرة.
- التحديثات المستمرة للمنزلق لا تؤثر على أداء لوحة التكوين.
- يتم إرسال المساحة إلى NT كنسبة مئوية (0-100).
- تم تقليل حجم الصورة إلى 700 ميجابايت من 2.1 جيجابايت.
2017.6 (13/11/17)
- أداة تصوير جديدة. تم اختبارها على أنظمة التشغيل Win7 وWin8 وWin10.
- نشر دفق الكاميرا إلى دفقات خادم الكاميرا. يعمل مع دفقات كاميرا لوحة المعلومات الذكية، ولكن هناك أخطاء معروفة في shuffleboard هنا
- تدرج رباعي على شرا�ئط المساحة، وتدرج تربيعي على شرائط نسبة العرض إلى الارتفاع. هذا يجعل الضبط أسهل بكثير
- تنظيم عناصر التحكم في علامات تبويب "الإدخال" و"العتبة" و"التصفية" و"الإخراج"
- تحديثات مستمرة أثناء سحب الشرائط
- إرسال المساحة إلى NT كنسبة مئوية (0-100)
- تقليل حجم عرض الصورة إلى 700 ميجابايت من 2.1 جيجابايت
2017.5 (11/9/17)
- تم تقليل حجم الصورة من 3.9 جيجابايت إلى 2.1 جيجابايت
- إضافة واجهات برمجة التطبيقات (APIs) لوضع السائق ووضع LED
- قم بتعيين ledMode إلى 0 أو 1 أو 2 في جدول limelight
- قم بتعيين camMode إلى 0 أو 1 في جدول limelight
- إضافة القدرة على التبديل بين صورة العتبة والصورة الخام عبر واجهة الويب (سيتم تحسينها في إصدار لاحق)
- نشر دفق الكاميرا إلى جداول الشبكة تحت CameraPublishing/limelight/streams (سيحتاج إلى إصلاح سريع)
- إضافة الانحراف إلى معلومات الاستهداف ("ts" في جدول limelight)
- إضافة "CommInterface" الأساسي تحسباً لمزيد من البروتوكولات
2017.4 (30/10/17)
- الكثير من التحسينات في عمليات التشغيل وإيقاف التشغيل
2017.3 (25/10/17)
- نطاق تدرج اللون Hue هو 0-179 بدلاً من 0-255
- تقليل الحجم الأقصى للسجلات، مسح السجلات، مسح ذاكرة التخزين المؤقت apt
2017.2 (23/10/17)
- حساسية ISO اليدوية
- زيادة الحد الأدنى للتعرض إلى 2
2017.1 (21/10/17)
- تحسينات
- تم تغيير "التحدب" إلى "الامتلاء"
- تم تعيين نطاق التعرض من 0-128 مللي ثانية بدلاً من 0-255 مللي ثانية
- دعم كاميرتين
- دعم كامل لمعايرة النقطة الواحدة